
0 引 言
目前,電壓外環電流內環的雙環控制方案是高性能逆變的發展方向之一。雙環控制方案的電流內環擴大逆變器控制系統的帶寬,使得逆變器動態響應加快,非線性負載適應能力加強,輸出電壓的諧波含量減小。
由于考慮到濾波電感等效電阻的壓降作用和電壓外環對電流內環的緩慢擾動作用,為要實現更好的控制效果,必須對控制對象實現狀態反饋解耦,消除輸出電壓產生的交叉反饋作用。本文在狀態反饋解耦的基礎上,建立了SPWM 的仿真" title="仿真">仿真模型,并在此基礎上進行了仿真。仿真過程考慮了死區效應和器件的損耗,因此是較為精確的模型。
1 單相電壓型逆變器的數學模型
為方便控制器的設計,首先建立單相SPWM(sinusoidalpulse wIDTh modulatiON)逆變器合理的數學模型。
圖1 中E 為直流母線電壓,ui為逆變器輸出電壓,uc為電容兩端電壓,iL為流過輸出濾波電感L 的電流,io代表負載電流。濾波電感L 與濾波電容C 構成低通濾波器" title="濾波器">濾波器。r 為包括線路電阻、死區效應、開關管導通壓降、線路電阻等逆變器中各種阻尼因素的綜合等效電阻。電壓ui可以取三個值:E,0或-E,因此,電壓ui是幅值為+E 或-E 的電壓脈沖序列。
由于逆變器電路中各個功率開關器件都工作在開關狀態,因此是一個線性和非線性相結合的狀態,分析時有一定的難度。可假設直流母線電壓源E 的幅值恒定,功率開關為理想器件,并且逆變器輸出的基波頻率、LC 濾波器的諧振頻率與開關頻率相比足夠的低,其截止頻率通常選擇在開關頻率的1/10 ~1/5 左右,則逆變器可以簡化為一個恒定增益的放大器,從而可以采用狀態空間平均法得到逆變器的線性化模型,單相電壓型SPWM 逆變器的等效電路如圖1 所示。
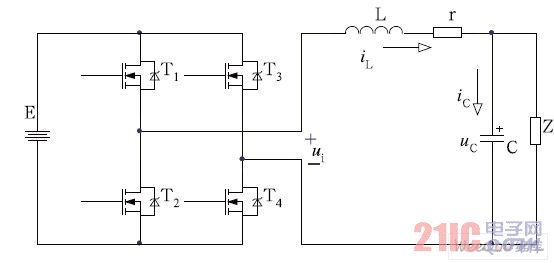
圖1 單相電壓型SPWM 逆變器等效電路
基于基爾霍夫電壓定律和電流定律,可以得到逆變器的小型號模型為:
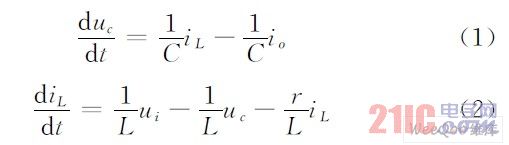
選擇電容電壓Uc和電感電流iL作為狀態變量,逆變器的連續時間狀態方程為:
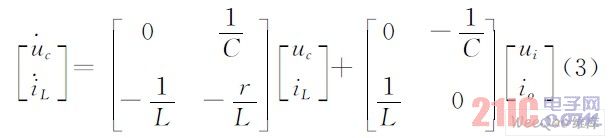
據此可以容易地推出其頻域傳遞函數:

從而可以得出逆變器在頻域下的等效框圖如圖2所示。
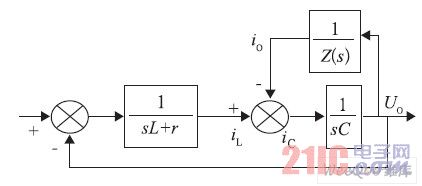
圖2 單相電壓型SPWM 逆變器的等效框圖
2 電流內環電壓外環雙環控制的基本原理
早些年,逆變器電壓電流雙環控制用輸出電壓有效值外環維持輸出電壓有效值恒定,這種控制方式只能保證輸出電壓的有效值恒定,不能保證輸出電壓的波形質量,特別是在非線性負載條件下輸出電壓諧波含量大,波形失真嚴重;另一方面,電壓有效值外環控制的動態響應過程十分緩慢,在突加、突減負載時輸出波形波動大,恢復時間一般需要幾個甚至幾十個基波周期,瞬時控制方案可以在運行過程中實時地調控輸出電壓波形,使得供電質量大大提高。其中,應用較多的有:電壓單環控制、電壓電流雙環控制、滯環控制等。
本文主要采用電流內環電壓外環的雙環控制,結構框圖如圖3 所示,輸出反饋電壓和給定電壓基準信號比較,形成瞬時誤差調節信號。經過電壓PI 調節器后作為電流給定基準值,與電流反饋信號比較,形成瞬時誤差信號,經過電流PI 調節器產生電流誤差控制信號。
該信號與三角載波交截后產生SPWM 開關信號,控制主電路開關器件,在LC 濾波器前端形成SPWM 調制電壓,經LC 濾波器后輸出正弦電壓。
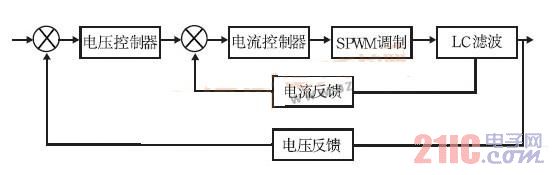
圖3 雙閉環控制系統框圖
2.1 具有狀態解耦的多環控制系統
在雙環控制系統中,由于電壓外環對電流內環具有緩慢擾動作用,要實現更好的控制效果,必須對控制對象進行解耦,消除輸出電壓產生的交叉反饋作用。
依據控制結構的不同,效果也會不一樣,文中對以下提出兩種改進方案進行分析。
(1)帶負載電流解耦的電感電流反饋
如果電感電流能夠得到快速跟蹤,則相對外環來說,內環動態過程可以忽略,負載電流就很容易解耦。
圖4 是實現了負載電流解耦的內環電感電流反饋控制結構圖。負載電流解耦把負載電流作為電流環附加指令,不必等到電壓誤差產生就能提供負載所需要的電流。這樣負載突變可以通過前饋有效地抑制,不依賴外環來調節,從而提高響應速度。電感電流內環的帶寬由Ki設置,帶寬越大,電感電流跟蹤的快速性越好,負載電流解耦的效果也越好,輸出波形的穩態精度也越高。

圖4 電感電流反饋控制框圖
指令傳遞函數:

擾動傳遞函數:

(2)帶輸出電壓解耦的電容電流反饋
從電路的角度來看,對LC 濾波器而言,出現負載擾動時,電感電流不能突變,只能影響電容電流。因此,電容電流反饋可以直接反映出負載電流的變化。
從擾動的作用點來看,采用電容電流反饋可以將負載擾動,包含在反饋環路的前向通道內,因此可以及時對擾動產生抑制。從反饋原理來看,反饋哪個量,就能增強那個量的穩定度,反饋電容電流能使其在負載汲取電流時仍有維持不變的趨勢。這樣,不需要擾動前饋補償,電容電流反饋結構就可以得到比僅用電感電流反饋要好的動態性能。從逆變器的輸出來看,只要精確保證電容電流為正弦,無論負載如何變化都可以得到良好的輸出正弦電壓。若取電感電流反饋(無負載電流前饋補償),那么負載擾動只能通過電壓外環調節;而取電容電流反饋,負載擾動在內環就可以得到及時的抑制。由于沒有檢測電感電流iL ,電感等效電阻無法解耦,其動態輸出特性在低頻段會受到一定影響。
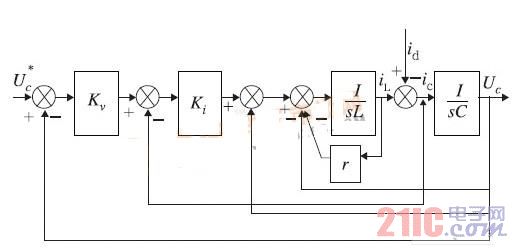
圖5 電容電流反饋控制框圖
指令傳遞函數:

擾動傳遞函數:

2.2 兩種控制策略的比較
逆變器的輸出是對指令響應和擾動響應的和,可以從指令傳遞函數和擾動傳遞函數兩方面入手,分析比較兩種方案的性能。首先通過對指令傳遞函數和擾動傳遞函數的bode 圖仿真來比較兩種方案的動態跟蹤性能和擾動抑制能力,從而選擇較好的控制方案。
在bode 圖仿真時,系統參數取基波頻率60 Hz ,濾波電感L=1 .1 mH,濾波電容C=20 μF,濾波電感等效電阻r =0.6 Ω,開關頻率20 kHz ,選取KV1 =0.2 ,Ki1 =22 ,KV2 =0.2 ,Ki2 =32 。

圖6 指令傳函的對數幅頻響應曲線
通過圖6 可以比較系統對指令的跟蹤效果,可以看到兩種方案低頻段增益均為1 ,能夠完全復現指令,開環逆變器的諧振峰均被消除,具有良好的指令動態跟蹤性能。
既然逆變器輸出是對指令響應和擾動響應的綜合,那么只分析逆變器對指令的跟蹤效果是不夠的,還要考慮對擾動的抑制能力,擾動傳函的對數幅頻響應曲線就能表征這個能力。
通過圖7 可以看到,由于擾動主要位于低頻段,所以通過這一段的波特圖判斷擾動抑制性能,低頻增益越小,表明系統對擾動的衰減越厲害,即對擾動的抑制效果越好。如圖所示,方案一對7 次以下的諧波均有衰減作用,方案二對5 次以下的諧波均有衰減作用,在60 Hz 處,方案一對基波擾動的抑制要好于方案二,這是因為方案二沒有實現電感等效電阻解耦,基波在這個電阻上有壓降,影響了輸出波形。
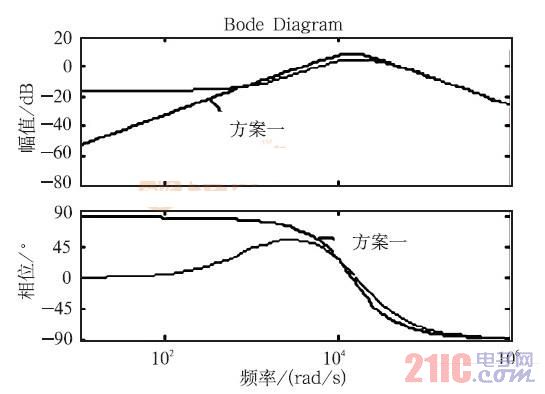
圖7 擾動傳函的對數幅頻響應曲線
通過以上對指令和擾動傳遞函數的分析可知,兩種方案對指令的跟蹤能力是很接近的,因此選擇方案的主要依據是它們對擾動的抑制能力。方案一通過前饋而方案二通過反饋對擾動進行補償,考慮到反饋電感電流能夠實現電感等效電阻解耦,故方案一在低頻段的擾動抑制能力強于方案二,因此,選擇方案一作為系統的控制結構。
3 系統仿真
3 .1 系統仿真模型
本文在MATLAB 環境下的Simulink 中建模和仿真。該仿真模型主要分為兩個部分:主電路和控制器。主電路如圖8 所示,控制器主要由電壓電流反饋環節、負載電流補償環節、SPWM 發生環節和死區延遲環節組成。從主電路仿真模型可以看到:在檢驗突加、突減非線性負載時,用兩個脈沖波、乘法器和理想開關組成矩形脈沖信號,周期為0.4 s ,在0。2 s 時突加額定負載,在0.4 s 時,突減額定負載。系統仿真參數取基波頻率為60 Hz ,直流母線電壓E=400 V,濾波電感L=1 .1 mH,濾波電容C=20 μF,濾波電感等效電阻r=0.6 Ω,開關頻率為20 kHz ,輸出電壓幅值為220 V,輸出額定功率因數cosΦ=0.8 。
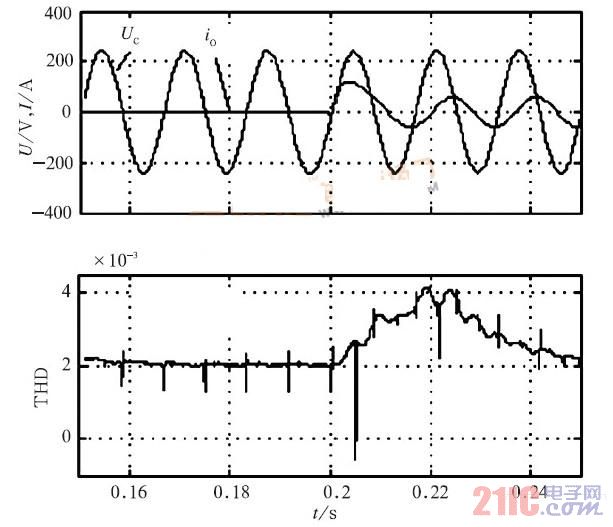
圖8 主電路仿真模型
3 .2 仿真結果分析
在以下三種不同運行條件下進行仿真實驗:
(1)在0~0.2 s 期間,逆變器空載運行;0.2 s 時突加負載運行。
(2)在0.2 s ~0.4 s 期間,逆變器在額定負載下運行。
(3)在0.4 s 時,逆變器突減負載運行。
三種條件下,輸出電壓、負載電流的波形圖和輸出電壓THD 的波形如圖9 ,圖10 ,圖11。

圖9 突加非線性負載運行

圖10 額定負載運行

圖11 突減非線性負載運行
仿真結果表明,基于狀態反饋解耦的雙環控制系統在不同的負載條件下,不但能獲得高質量的輸出電壓波形,并且動態響應速度快:
(1)系統動態響應快,在三種條件下運行,都可以在兩個周期內(<0.4 s )進入穩態。
(2)輸出電壓質量高,諧波含量少,在突加突減負載時,總THD 值不超過0.4 %,進入穩態后,THD 值不超過0.3 %。
(3)抗干擾能力強,對突加突減非線性負載所引起的波形失真具有很強的抑制能力,在兩個周期內(<0.4 s ),就可校正波形失真。
4 結 論
本文建立的電壓電流雙環控制系統,采用負載電流解耦的內環電感電流反饋、狀態反饋解耦控制結構,對單相SPWM 逆變器進行建模與仿真。仿真結果表明,所采用的控制方案使逆變器具有輸出電壓質量高(總THD≤0.4 %),動態響應速度快(不超過0.4 s ),抗干擾能力強等優點,能夠較好地達到高性能指標的要求,具有很高的工業使用價值。