
0 引言
伴隨著城市化進程,人們生活的交通距離不斷擴大,代替燃油汽車和自行車的電動車的普及大幅度的提高了電力資源的利用效率,促進了國民經濟的健康發展。電動自行車以電力作動力,騎行中不產生污染,無損于空氣質量。從改善人們的出行方式、保護環境和經濟條件許可情況等因素綜合來看,電動自行車目前乃至今后都有著廣闊的發展空間。電動自行車所用直流電機分為有刷電機和無刷電機" title="無刷電機">無刷電機兩種。其中有刷電機控制較簡單。但其易磨損的電刷帶來維修保養工作量相對較大、使用壽命相對較短等缺點。而直流無刷電機本身沒有易磨損部件,電機壽命長,維修保養工作量小。但直流無刷電機采用電子換向原理工作,其控制過程比有刷電機復雜得多,因此對控制器質量的要求也高得多。
目前電動自行車采用的直流無刷電機都是三相電機,電角度有60°和120°兩種。電機極數大部分為18極,也有16極、20極等。控制器根據霍爾反饋的電機電極位置,控制相應的功率驅動管的開通或關斷,在定子中產生旋轉磁場,驅動電機的轉子轉動。
為了判斷無刷控制器是否能夠正常運行,也就是檢測轉把和剎車功能是否正常,判斷控制器的角度是60°還是120°,并且確定繞組A,B,C相與位置信號a,b,c之間的對應關系,正確地將控制器與電機進行連接,現在很多的檢測儀器都采用模擬電路,使得結果不是很精確,而且需要的電路也很復雜,成本很大。設計采用STCl2C5410AD" title="STCl2C5410AD">STCl2C5410AD單片機作為控制芯片,大大簡化了硬件電路,以軟件編程來實現。
l 電動車無刷電機控制器簡介
控制器由周邊器件和主芯片(或單片機)組成。周邊器件是一些功能器件,如執行、采樣等,它們是電阻、傳感器、橋式開關電路,以及輔助單片機或專用集成電路完成控制過程的器件;單片機也稱微控制器,是在一塊集成片上把存貯器、有變換信號語言的譯碼器、鋸齒波發生器和脈寬調制功能電路以及能使開關電路功率管導通或截止、通過方波控制功率管的的導通時間以控制電機轉速的驅動電路、輸入輸出端口等集成在一起,而構成的計算機片。這就是電動自行車的智能控制器。
控制器的設計品質、特性、所采用的微處理器的功能、功率開關器件電路及周邊器件布局等,直接關系到整車的性能和運行狀態,也影響控制器本身性能和效率。不同品質的控制器,用在同一輛車上,配用同一組相同充放電狀態的電池,有時也會在續駛能力上顯示出較大差別。
目前,電動自行車所采用的控制器電路原理基本相同或接近。有刷和無刷直流電機大都采用脈寬調制的PWM控制方法調速,只是選用驅動電路、集成電路、開關電路功率晶體管和某些相關功能上的差別。元器件和電路上的差異,構成了控制器性能上的不同。
2 系統硬件電路設計
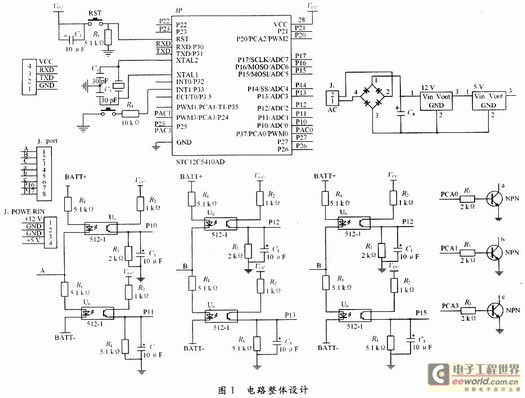
為了判斷無刷控制器是否正常,測量控制器各個部分的輸出信號是否符合標準,并且能夠接收電機、轉把、剎車的信號,判斷這個控制器是否能實現其需要實現的功能,系統要檢測控制器的轉把和剎把是否有穩定的5 V電壓輸出,判斷控制器的角度,以及判斷霍爾控制線相序及與其對應的電機電源相序是否一致。只有位置傳感器信號和繞組A,B,C正確連接才能使電機正常運行。圖1為電路整體設計原理圖,系統采用STCl2C5410AD單片機作為主要控制芯片。STCl2C5410AD系列單片機是宏晶科技生產的單時鐘/機器周期(1T)的單片機,是高速、低功耗、超強抗干擾的新一代8051單片機,指令代碼完全兼容傳統8051,但速度快8~12倍,內部集成MAX810專用復位電路,4路PWM,8路高速10位A/D轉換,專門針對強干擾場合電機控制。
2.1 橋式整流電路
因為控制器工作需要的是直流電,所以需要加個整流電路。系統選用的是單相橋式整流電路。這種電路只要將四只二極管口連接成“橋”式結構,便具有全波整流電路的優點。
2.2 剎車與轉把信號的檢測
剎車信號高低電位的變化,是控制器識別電動車是否處于剎車狀態,從而判斷控制器是否給電機供電的依據。只要將剎車和轉把信號的輸出端接到STCl2C5410AD單片機的A/D轉換端P16和P17,便能檢測輸出是否正常。
2.3 控制器角度與相序的判斷
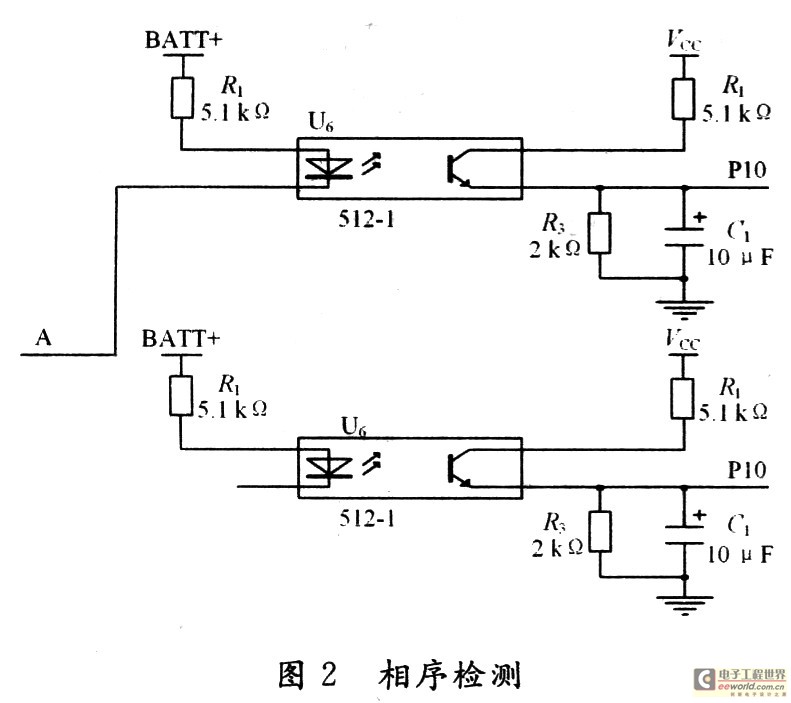
如圖2所示,首先判斷繞組電壓A的輸出,將兩個光藕合器連到控制器的末級,與A的上下管并聯起來,當A的上管導通時,A輸出高電壓,使下面的光耦導通。從而輸出一個電壓值,通過STCl2C5410AD單片機的A/D轉換端P11口送到單片機中;當A的下管導通時,A輸出低電壓,使上面的光耦導通,從而輸出一個電壓值,通過STCl2C5410AD單片機的A/D轉換端P10口送到單片機中。B和C用上面同樣的接法。在輸出時沒有直接輸出,而是通過光耦隔離后才輸出,原因如下:光耦合器的信號單向傳輸,輸入端與輸出端完全實現了電氣隔離,輸出信號對輸入端無影響,抗干擾能力強、工作穩定、無觸點、使用壽命長、傳輸效率高。
3 系統軟件設計
3.1 總體設計流程圖
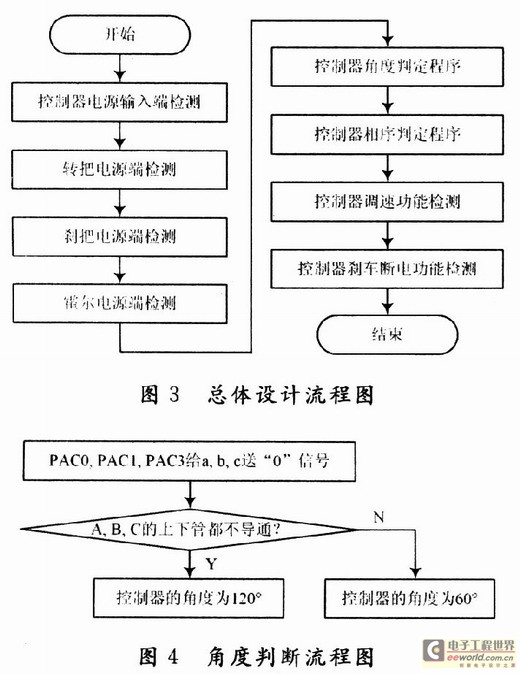
總體設計流程圖如圖3所示。
測量控制器輸入端阻抗,當其大于10 Ω時為正常,否則電源輸入端短路。轉把、剎把、霍爾電源端的檢測要保證輸出電壓大于4.5 V。控制器角度和相序的判斷根據無刷真值表進行判斷和檢測,以下僅以控制器角度判斷為例進行說明。
3.2控制器角度判斷程序設計
由表1可以看出當a,b,c都取“0”,控制器角度為120°的時候,A,B,C上下管都不導通;而控制器為60°時A的上管和B的下管導通,這樣便能根據a,b,c都取“0”時,A,B,C的輸出信號來判斷控制器的角度。流程圖如圖4所示。

4 結語
系統設計采用STCl2C5410AD單片機作為控制芯片,電路簡單,測量精確,很好地滿足了電動車無刷電機控制器檢測的各項需求,能夠檢測控制器接轉把和剎把端是否正常,能夠判斷控制器的角度,霍爾控制相序以及與其對應的電機電源相序是否一致。希望該設計在將來的應用中得到更好的改進和完善。