
摘 要: 系統地介紹了多微機控制VVVF電梯的各個部分的原理及其相關的硬件回路,敘述了各CPU間的協調控制。實踐證明這種電梯具有速度快、效率高、舒適性好、可靠性高、節約電能的顯著特點。
關鍵詞: 多微機控制 VVVF電梯
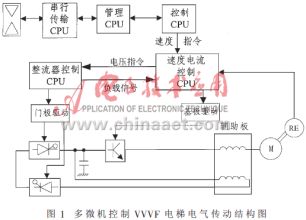
電梯是為高層建筑交通運輸服務的比較復雜的機電一體化設備。隨著高層建筑的發展,對電梯的數量和運行速度、控制性能的要求愈來愈高。同時,隨著功率電子技術、微電子技術和計算機控制技術的發展,使微機控制的交流調速電梯得到迅速發展。但是在電梯控制中,僅僅采用一個CPU已遠遠不能滿足要求。本系統中就采用了五個CPU,它們分別為NB-CPU、BH-CPU、KZ-CPU、GL-CPU、CS-CPU。相應的整個系統也分為五個部分:以NB-CPU為核心的變頻器逆變部分;以BH-CPU為核心的變頻器變換部分;以KZ-CPU為核心的控制部分;以GL-CPU為核心的管理部分,以CS-CPU為核心的串行傳輸部分。系統總的結構框圖如圖1所示。下面對各個部分進行詳述。
1 系統的電力拖動部分
1.1 速度圖形
電梯是垂直方向運行的交通工具,其運行的平穩性極為重要。為了使電梯運行平穩,必須對電梯電機進行精確的調節控制,而精確調節控制的必要條件之一就是要有一個較理想的運行速度圖形。高速VVVF電梯的速度圖形是根據人體生理適應要求設計,并通過實驗而確定的,它能很好地與矢量變換控制的拖動系統進行配合,使高速VVVF電梯運行平穩性達到較高的水平。
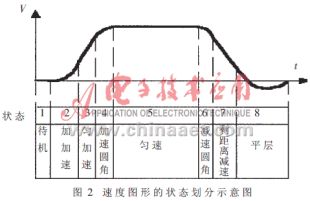
高速VVVF電梯的速度圖形如圖2所示。從速度圖形形式上看,高速VVVF電梯將速度圖形劃分為8個狀態進行處理,由KZ-CPU控制部分完成。控制部分的S/W每周期都計算出當時的電梯運行速度指令數據,并傳輸給速度電流控制NB-CPU,使其控制電梯按照這個速度圖形曲線運行。下面對各個狀態具體說明:
(1)停機狀態(狀態1)
在電梯停機時,速度圖形值為零。此時實際上并沒有對速度圖形進行運算,僅是在KZ-CPU的每個運算周期中對速度圖形賦零,并設置加速狀態和平層狀態時間指針。
(2)加加速狀態(狀態2)
電梯在起動開始時,首先作加加速運行。這個過程中,速度圖形在每個運算周期的增量不是常數,而是隨時間變化的數據。因此,在實際處理時,為了便于運算,預先用數據表把不同運算周期的速度增量設置在EPROM中,S/W在每個運算周期中,根據數據表內的速度增量進行運算。當時間指針小于零時,加加速運行狀態運算結束,S/W轉入狀態3運算。
(3)勻加速狀態(狀態3)
電梯在加加速結束后,即進行勻加速運動。在勻加速運行過程中,速度圖形的增量是常數。實際運算時,CPU進行常數增量運算。
(4)加速圓角運行狀態(狀態4)
加速圓角是指電梯從勻加速轉換到勻速運行的過渡過程。在這個過程中,每一運算周期的速度增量不是常數,所以也采用了數據表的方式。S/W在每個運算周期中進行查表運算,直到運算時間指針小于零時,加速圓角狀態運算結束,S/W轉入狀態5運算。
(5)勻速運行狀態(狀態5)
在這個狀態中,電梯勻速運行。速度圖形增量為零,即加速度為零。
(6)減速圓角運行狀態(狀態6)
在這個狀態中,電梯從勻速運行過渡到減速運行。因此,每個S/W周期的電梯速度變化量比較復雜。為了精確、快速運算,處理方法與狀態4一樣,在EPROM中預先設置各周期中速度變化量數據表。S/W在每個運算周期中進行查表運算。S/W一直運算到當速度圖形值小于剩距離速度圖形值時,即轉入狀態7運算。
(7)剩距離減速運行狀態(狀態7)
以上所述的6個狀態中,電梯的速度圖形都是時間的函數,從狀態7開始,即電梯進行正常減速運行時,速度圖形是剩距離的函數,其函數關系比較復雜,不能用簡單的計算式來表示。所以,又采用了數據表的方法,即預先在EPROM中設置一對應剩距離的速度圖形數據表。S/W根據此數據表中的值進行運算,當轎廂進入平層開始位置時,即由狀態7轉入狀態8運算。
(8)平層運行狀態(狀態8)
在狀態8中的前一段時間里,速度隨時間而變化。每個運算周期中的速度下降量是預先設置在EPROM中的隨時間變化的數據值。當速度圖形值小于平層速度指令的規格化數據值時,速度圖形值被指定為平層速度指令的規格數據值。平層速度的規格化數據值是一個不大于零的值,它通過旋轉開關進行調節、設定。
當轎廂完全進入平層區,上、下平層開關全都動作時,電梯停車,平層狀態結束,狀態又回復到狀態1。
1.2 系統控制電路
中/高速電梯運行時能提供一個大的再生能量,這就需要提供再生能量的通道,將再生能量反饋至電網,實現節約電能。中/高速電遞控制系統是在低速電梯控制系統的基礎上,將原來電網側的一組硅二極管組成的三相橋式整流電路(變換器)改為二組三相晶閘管電路。即其中一組晶閘管三相橋式整流電路,用于將三相交流電源變成直流電源,且直流電源的電壓幅值是可控的,供給變頻器的逆變器,它在電動機電動狀態下工作;另一組是晶閘管組成的三相逆變電路,用于電動機再生狀態時,將電動機再生能量變成50Hz的交流電能饋入電網。圖3為系統的主回路。

1.3 變頻器變換部分的控制電路構成
圖4為變頻器變換部分的控制電路簡圖。電路以十六位微機(i8086)為主控元件,根據速度控制電路給出的電壓指令(Vc)和系統負載信號、電壓反饋、電流(電網側)反饋信號等進行運算,產生觸發信號。電路配置了鎖相環專用電路(PLL.IC)和混合集成電路(HIC),用以產生觸發脈沖序列對主電路SCR進行控制。

1.4 變頻器逆變部分的控制電路構成
圖5是變頻器逆變部分控制電路簡圖。電路由十六位微機(i8086)給出的給定速度指令和負載信號、速度反饋信號等進行運算,產生電流指令。電路中配置了PWM電路和混合集成電路(HIC),用以產生基極驅動信號。

2 系統管理部分
管理部分的工作由GL-CPU執行,其主要工作有:
·根據轎廂召喚信號和廳門召喚信號,確定電梯的運行方向;
·在電梯停機時,提出高速自動運行的起動請求;
·在高速自動運行的過程中,提出減速停機請求;
·各種電梯附加操作,如返回基站、自動通過等動作順序的控制;
·開關門的時間控制。
3 系統控制部分
控制部分的工作由KZ-CPU執行。其主要工作如下:
·選層器運算。計算轎廂位置信號、層站信號、剩距離等;
·速度圖形運算。計算電梯運行過程中的速度指令;
·安全電路。電梯的安全條件檢測和運算。
4 拖動系統多微機控制總線
高速VVVF電梯的電力拖動系統由多微機控制,圖6是拖動系統多微機控制總線示意圖。NB-CPU和BH-CPU是十六位微機(i8086),KZ-CPU和GL-CPU是八位微機(i8085)。
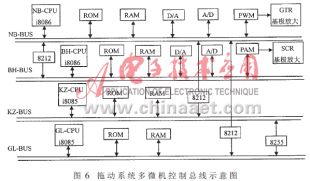
NB-CPU主要處理速度反饋和速度指令運算、電壓指令運算、電流指令運算和矢量變換運算,主要控制變頻器逆變部分。
BH-CPU主要處理電壓反饋和負載反饋信號、電壓指令運算、電流反饋信號運算和SCR觸發角大小運算,主要控制變頻器變換部分。
NB-CPU和BH-CPU之間采用八位輸入/輸出接口8212連接,各自的ROM、RAM和I/O地址均相互獨立,基本軟件也相互獨立,共用數據存在指定的區域,運行時可以相互調用。
KZ-CPU和GL-CPU分別為電梯電氣系統的控制部分和管理部分的微機,在拖動系統中僅參與了一部分工作。KZ-CPU主要進行速度圖形運算,運行時向NB-CPU發出給定速度指令。GL-CPU主要協調管理控制過程。由于KZ-CPU、GL-CPU和NB-CPU、BH-CPU的工作頻率和位數不同,故采用八位輸入/輸出接口8212連接,用中斷方式進行通信。
5 串行傳輸部分
5.1 串行傳輸部分硬件設計
電梯呼叫信號的傳遞是十分復雜的,這是因為電梯的指令與召喚信號不僅數量多,線路長,而且干擾大。為了減少機房、井道走線,便于安裝、調試和維修,而引入了串聯傳遞系統,并使電梯控制全微機化,提高了整個系統的可靠性。
該系統僅需9根信號線就能實現上述全部功能。信號線的多少與層站數目無關,即電梯的層樓可無限制地擴展。9根線中有3根是電源線,即按鈕電源、顯示電源、地線。其它6根信號通過軟件控制。從圖7中可以看出,這6根線分別為:
·方向選擇控制信號DIR;
·輸入同步信號SYNCI控制和輸出同步信號控制SYNCO;
·時鐘信號CLOCK線;
·數據采樣信號DI線;
·顯示信號DO線。
串行傳輸原理為:控制板通過同步信號SYNCO對信號處理板按順序進行逐個訪問。被訪問到的信號處理板可與控制板建立起“對話”關系,此時我們稱該信號處理板被“激活”。一方面,該信號處理板將采集到的召喚(指令)信號DI傳給控制板。另一方面,控制板又將控制信號(燈控信號)DO傳給控制板。上述數據信號的交換是在統一的CLOCK時鐘信號下按節拍進行的。數據信號交換完畢后,同步信號SYNCO由該信號處理板傳到下一個信號處理板的SYNCI,“激活”下一個信號處理板與控制板進行數據交換工作。控制板遍訪全部信號處理板后將重新回到第一塊信號處理板,由此實現循環處理。
5.2 串行傳輸部分軟件設計
采用串行傳輸進行按鈕信號采集后,省掉了大量的井道敷線,但是同時增加了軟件負擔,因而串行傳輸部分軟件設計顯得格外重要。
整個軟件的基本思想見圖8。
 ??
?? 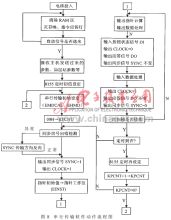
從圖中可以看出一次掃描周期內CLOCK被不停地置為1、0從而產生連續的方波,SYNC是脈寬為一個CLOCK周期的高電平,它被連續地傳遞給各樓層。從而使信號處理板與主控機房建立聯系。縱觀整個程序,其最大特點是增加了抗干擾設計,具體體現在以下幾個方面:
(1)在每次掃描結束后都要對同步信號進行處理。硬件上的結構使得在一次掃描結束時,同步信號SYNC要返回控制器,即此時控制器應該能收到一個高電平的同步信號,否則就認為同步信號傳輸不正常,并能自動地進行反方向的掃描。如果原來掃描是從底層到頂層的話,現在則從頂層掃描到底層,反之亦然。
(2)8155對軟件CLOCK不斷計數,計數完畢后又重新開始,循環256次后,程序會自動地進行參數和指針的重新設置。這樣定時地刷新參數和指針,可以避免外界對程序的干擾。
這種多微機控制變頻變壓交流調速電梯的運行速度已達6m/s,屬世界一流水平。它顯示出速度快、效率高、舒適性好、可靠性高、節約電能顯著的特點,與同規格交流調壓調速電梯相比可節約電能50%;與可逆晶閘管直接供電給直流電動機的直流電梯相比,可節約電能10%以上,且維護調試方便。它投入市場時間不長,但是已被世界各國普遍使用,運行性能很好,深得用戶好評。
參考文獻
1 毛宗源.微機控制電梯.北京:國防工業出版社
2 沈輝忠.SP-VF電梯操作功能說明.上海:上海三菱電梯有限公司(內部資料)
3 Rudy Lamps.Elevator modernization,modern control systems and static drives.LIFT-REPORT.1998