
步進電動機是一種將數字信號轉換為位移(或直線位移)的機電執(zhí)行元件,每當輸入一個脈沖時,轉軸便轉過一個固定的機械角度,他具有快速起停、精確步進、沒有積累誤差且能直接接收數字信號的特點,在數字控制系統中得到了廣泛的應用。步進電機的運動性能和他的驅動器有密切的關系,驅動器的性能的優(yōu)劣直接影響到步進電機運行的好壞。細分驅動方式可以減小步進電機的步矩角,提高分辨率,使電機運行更加平穩(wěn)均勻,可以減小或消除低頻振動。利用恒流和細分驅動技術可以大大提高步進電機的步矩分辨率,減小轉矩波動,避免低頻共振及降低運行噪聲。通常的步進電機控制方法是采用CPU配合專用的步進電機驅動控制器來實現,存在成本高、不同種類的電動機必須要有相應的驅動控制器與之配對的問題。
1 混合式步進電機原理分析
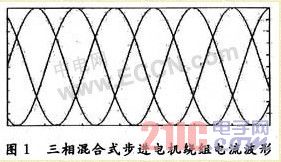
混合式步進電機通常只有整步和半步兩種工作方式,當要求更小的步進角和更高的分辨率時,可通過改變定子繞組電流來實現。繞組電流給定采用經量化處理后的正弦波并分段切人,將繞組電流給定與反饋進行比較,并根據比較結果決定該相繞組的通斷,最終得到正弦化的定子繞組電流。步進電機在高度細分運行時需要在電機內產生接近均勻的圓形旋轉磁場各項繞組的合成磁勢矢量,即各相繞組電流的合成矢量應在空間作幅度恒定的旋轉運動,這就需要在各相繞組中通以正弦電流,三相混合式步進電機的三相繞組A,B和C在空間位置上相差2π/3,如圖1所示。
給定三相繞組分別通過相位相差2π/3而幅度相同的正弦波電流,則合成的電流矢量在空間做幅值恒定的旋轉運動,設三相電流分別為:
這是一個以3/2im為幅值、-α為幅角的逆時針旋轉矢量。對于三相混合步進電機,三相繞組可以連接成星形或者三角形,按照電路的基本原理三相之和為0即:
![]()
通常對三相混合式步進電機進行驅動控制,需要產生相互獨立的三相給定信號,然而按照上述分析,只需要產生兩相繞組的給定信號,第三相繞組的給定信號可根據式(5)由其他兩相求得。同樣,只需要對相應的兩相繞組的實際電流進行采樣,第三相繞組的實際電流可根據式(5)求得。步進電機是脈沖電路驅動的伺服執(zhí)行器件,在環(huán)行脈沖分配器的控制下,設輸入一個控制脈沖,電機繞組的通電狀態(tài)改變一次,三相步進電機在三相六拍的控制方式下,A,B,C三相的通電狀態(tài)為:A-AB-B-BC-C-CA-A……。
2混合式步進電機系統構成與實現
基于AVR單片機和CPLD的三相混合式步進電動機控制系統的結構框圖如圖2所示。
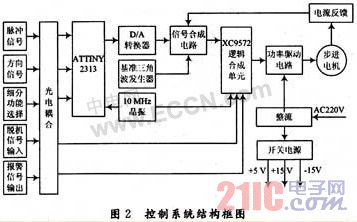
系統主要包括脈寬調制產生電路、邏輯合成電路、功率驅動電路和電源等4個部分。本設計采用的方法是:單片機采集到現場信號后計算出步進電機運轉所需要的控制信息,經過參考電路與反饋信號發(fā)生相互作用,得到脈寬調制信號后再傳給CPLD,CPLD把接收到的信息轉換成步進電機實際的控制信號,即轉動速度和轉動方向,輸出給電機的功率驅動電路模塊。下面具體介紹脈寬調制產生電路和脈寬調制產生電路部分。
2.1 PWM信號產生
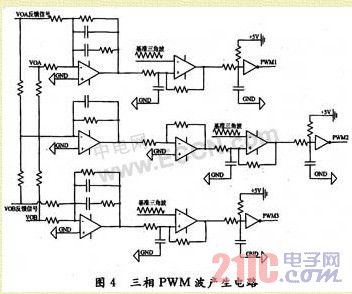
脈寬調制產生電路主要有單片機和外圍的電路組成,如圖3所示。
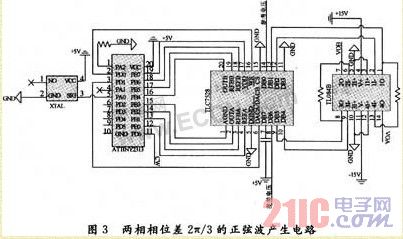
單片機主要完成轉速、轉向和細分數的設定。脈沖信號(CP)和方向信號(CW)均由外部控制電路輸入,在脈寬調制產生電路中通過高速光電耦合器件和外部控制電路隔離,盡量減少由脈沖信號引入干擾的可能性。中心控制器件采用ATMEL公司的ATTINY2313單片機,ATTINY2313單片機使用AVRRISC結構,有32個8位通用工作寄存器,全靜態(tài)工作,工作于20 MHz時性能高達20 MIPS。內部集成了128 B的系統內可編程E2PROM和128 B的片內SRAM,具有獨立預分頻器及比較模式的8位定時器/計數器,有兩個全雙工的串行通信口,集成看門狗復位電路,由于具有這些優(yōu)點,使得驅動電路變得更加簡潔和高效。在單片機的E2PROM內存儲相應的sin(α)和sin(α+2π/3)波形的函數值,單片機復位后,首先讀出PD3,PD4和PD5的值,來確定細分的大小,細分的數目可以任意設定,這使系統的通用性有了很大的提高。PD2口讀入脈沖,PD8讀入電動機的轉向。波形發(fā)生器的工作原理:在輸入步進脈沖CP和方向邏輯控制信號CW的同時,來判定細分的數目,E2PROM中有選擇的讀出需要的sin(α)和sin(α+2π/3)波形函數細分值,在經過D/A轉換器TLC7528變成模擬量。由于TLC7528只有兩路輸出,所以只能得到兩路模擬量,即在TL084B的第7(VOA)腳和14(VOB)腳得到相位差2π/3的正弦波。
由于需要的是三相相位差是2π/3的正弦波,可以用式(5)的方法,在VOA和VOB的輸出端用一個加法器和一個反相器就得到第三相正弦波信號,式(6)為其簡單的推導。
電流控制采用芯片TL084B實現。該芯片內部誤差放大器將電流給定和電流反饋進行比較,再和基準三角波進行作用,經過電流調節(jié)后輸出PWM信號,如圖4所示,輸出端得到脈寬調制信號。
2.2功率驅動電路
功率驅動電路采用三菱公司的IPM功率模塊PS21564。PS21564是專用的電機控制器,適用于三相步進電機控制。他內部有三個相互獨立的高低端輸出通道,可以驅動工作電壓不高于600 V的MOSFET和IGBT。他自身的工作電源電壓范圍13.5~16.5 V,輸出驅動信號電壓為20 V,輸出最大正向峰值電流為30 A,他的輸出驅動信號的最小上升時間為600 ns,最小下降時間為300 ns,可以在較高的頻率下工作。通過外接采樣電阻,當被驅動器件過流時,內部的過流保護電路就會封鎖輸出,從而保護功率器件不被損壞。應用HVIC實現集成電平轉移,高電平導通邏輯,可與DSP/MCU接口兼容。智能IPM功率模塊內置短路、欠壓保護電路,輸入信號端內置下拉電阻,外部無須再下拉電阻,熱阻低,易于散熱,2 500 V絕緣耐壓,驅動電路如圖5所示。
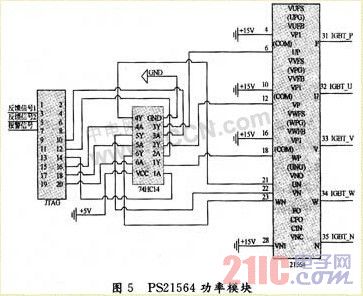
信號在CPLD內轉化為PS21564所需要的六路橋,經74HC14反相器輸入到PS21564,處理轉換成U,V,W來驅動電機。FO引腳為故障輸出,當為低電平時反饋給CPLD報警信號,CPLD收到信號后,關斷u_down,u_up,v_down,v_up,w_down,w_up,停止信號的傳送。
3結 語
利用本文設計的驅動器帶動90BYG306三相混合步進電機進行試驗,三相繞組用三角形接法,采用交流伺服控制原理,在控制方式上增加了全數字式電流環(huán)控制,三相正弦電流驅動輸出,使三相混合式步進電機低速無爬行、無共振區(qū)、噪音小。該系統具備細分和半流功能,多種細分選擇,最小步矩角可設置為0.036°。采用細分驅動后扭矩波動大大減小,從而消除了低頻振蕩對系統的影響,同時降低了高頻失步對系統的影響。單片機程序由ICCAVR編寫,復雜可編程邏輯器件程序由ISE 9.1i編寫。由于步矩角減小電機分辨率高,波形輸出穩(wěn)定,電機運行更平滑,噪聲更小電機驅動平穩(wěn)。另外驅動電路具備短路、過壓、欠壓、過熱等保護功能,可靠性高.