自2005年開始,我國的發電行業便面臨煤荒導致的電荒。如今,煤電帶來的環境污染、全球變暖以及我國承擔的減排任務都迫使我們必須尋求解決電源困局之道,調整能源結構,優先發展風電、太陽能發電和生物質能發電是現今技術條件下的最佳選擇。本片案例是為太陽能光伏電池覆蓋鋼化玻璃板流水線作業打孔,設備加工精度,效率要求高,在不降低性能的前提下,最大程度的控制了成本。
1 設備概況
全自動玻璃打孔機包含6顆伺服、定位軸、X1及X2送料軸、Y軸、Z1軸、Z2軸。具體如圖1所示。
圖1 全自動打孔機示意圖
(1)定位軸:選用玻璃精確定位(B2伺服*1),經減速機后由絲杠傳動。計算打孔點到玻璃邊沿距離,定位到位置后,放下擋塊,實現玻璃板的精確定位;
(2)X軸:玻璃傳送(B2伺服*2),經減速機后直接驅動。高摩擦力傳送帶,同時配合壓夾裝置,保證玻璃板傳送方向,傳送帶的位置和速度由前后兩個伺服控制,通過計算打孔點到玻璃邊緣的位置,傳送帶定位到對應路徑位置;
(3)Y軸:打孔鉆頭定位(A2伺服*1),經減速機后由絲杠傳動。鉆頭安裝在Y軸上,根據Y坐標點,計算打孔點到玻璃邊緣的距離,控制Y軸的位置和速度到達指定打孔點;
(4)Z1、Z2:鉆頭進給定位(A2伺服*2),經由大小輪及絲杠傳動。Y軸定位后,下鉆頭較高速度1接近玻璃表面,再以速度2進行距離1的倒邊,再以速度3進行距離2攻進,最后以速度4慢速退刀;下鉆頭退刀后上鉆進行與下鉆類似的動作完成打孔。
圖2 X軸擋塊

圖3 Y軸及Z軸
2 技術參數
2.1 設備指標
設備指標如表1所示。
表1 設備指標
2.2 硬件清單
硬件清單如表2所示。
表2 硬件清單
2.3 軟件清單
軟件清單如表3所示。
表3 軟件清單
4 輔助工具
輔助工具如表4所示。
表4 輔助工具
3 工藝說明
3.1 定位軸
定位軸使用B2伺服驅動,控制上采用絕對值定位DDRVA。確定基準后,采用絕對值定位可以靈活定位到指定位置,避免一定量的數學計算;當一次定位完成,開始打孔后,便進行下一個孔位置的比較,如果X坐標相同則不需要再次定位,X坐標不同,則進行下一次定位,定位到位前放下擋塊,慢速進入預定位置待命;最后一個空定位完成后,收起擋塊定位至第一孔位置,等待玻璃送出后放下擋塊。
3.2 Y軸
Y軸使用A2伺服驅動,控制上采用絕對值定位DDRVA。因為Y軸上有玻璃夾持壓盤,所以Y定位或重新定位前壓盤必須解除;孔的Y坐標與下一個想同時,只需要壓盤、壓緊、定位和送料動作后,即可以打孔。
3.3 X1、X2
X1、X2使用兩臺B2伺服分別驅動,控制上采用增量式定位,分送料后和送料前兩部份。送料過超聲波后,X2不需要同步送料,這時要高速補料到超聲波前光電位置,以提高工作效率;送料到超聲波后,以一般速度移動,當接近至一定距離時,再以慢速接近——最后貼上擋塊。
3.4 Z1、Z2鉆頭位置定位
Z1、Z2使用兩臺A2伺服分別驅動,控制上采用PR觸發來控制鉆頭位置。位置1(6-03),高速(5-60)接近位置1;位置2(6-05),速度1(5-61)攻進1;位置3(6-07),速度2(5-62)攻進2;位置4(6-09),速度3(5-63)退刀;因為玻璃厚度不同,不同規格的玻璃的鉆頭攻進1位置,攻進2的位置需要進行調整,此時,對應PR路徑參數通過通訊修改,以滿足加工需求。
圖4 PR參數
圖5 通過軟件規劃PR路徑
通過Delta ASDA-Soft 規劃PR路徑,使用絕對值定位,規劃加速和減速時間以及目標速度索引;需要修改路徑時,通過通訊修改對應路徑的參數(例如06-03對應路徑1的位置命令DATA)。
4 工藝流程圖
圖6 工藝流程圖
在程序設計中,因為工藝穿插比較靈活,所以選擇臺達步進程序進行設計,將整套設備的動作進行細分,在每個步中設計獨立的控制動作,這樣可以很好地提高工作效率;除以上流程中的功能外,設備中還有潤滑功能、修鉆功能、修訂基準、慢速前進、慢速后退,這些動作因為基于步進的思路設計,所以可以靈活的穿插在程序中。
例如,當定位伺服電機完成最后一次定位,同時設備開始打孔后,定位電機需要后退一定距離,再定位到第一個孔前一定位置,等待打孔完成,然后將玻璃送出一定距離后,再把定位擋塊放下,最后慢速靠近第一個孔的定位位置。這里因為采用步進程序設計,這部分程序獨立流程設計,形成一個專門的流程控制回路,就可以很容易實現,又不會影響原有控制的邏輯流程。
5 系統硬件結構
圖7 結構示意圖

圖8 系統實際布置
利用28SV的4路200K高速脈沖分別控制定位軸、Y軸、X1送料、X2送料四個伺服;同時利用28SV的COM2通訊口通過485通訊,與Z1、Z2進行通訊,修改PR位置參數和速度參數;與3臺變頻器進行通訊,修改變頻器的頻率參數。
6 HMI界面

圖9 HMI
HMI首頁顯示打孔數量和設備運行狀況。設置孔數后(確定孔距參數通過其他頁面完成),通過控制柜面板按鈕啟動開始打孔。

圖10 設備參數
在參數設置界面,用戶設置各軸的機械補償及時間參數;玻璃送出距離是當玻璃加工完畢后將玻璃送出的距離,玻璃送出后定位軸才可以再次定位,否則將造成玻璃的擠壓和破損。
圖10 設備參數
在參數設置界面,用戶設置各軸的機械補償及時間參數;玻璃送出距離是當玻璃加工完畢后將玻璃送出的距離,玻璃送出后定位軸才可以再次定位,否則將造成玻璃的擠壓和破損。

圖11 孔參數設置1
圖12 孔參數設置2
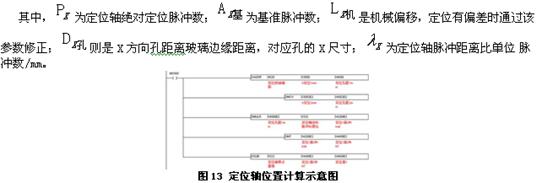
7.2 Y軸位置計算
Y軸位置計算如下:
圖14 Y軸計算示意圖
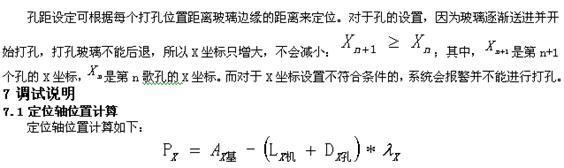
7.3 孔位置循環比較確定
X坐標在400mm~1500mm范圍內依次增大設置;Y坐標0mm~1500mm范圍內任意設置;鉆孔數量是36。定位到某個孔的坐標并開始打孔,此時比較當前孔的X坐標與下一個孔X坐標是否相同。相同時,定位軸保持不動,Y軸重新定位后打孔;不同時,定位移動至下一定位位置;同時Y打孔結束后比較當前孔的X坐標與下一個孔X坐標是否相同,根據比較結果決定是否再次送料與是否繼續打孔,相同則Y軸定位后打孔;不同就送料到位,Y軸定位后打孔,兩個動作同時進行以提高效率。
圖15 孔位置循環設定
7.4 節拍控制
因為孔的位置不確定,就必須設計一個可以實時計算坐標位置,靈活跳轉在多個動作中;通過對設備工藝反復研究,確定兩個重要的控制節拍:
(1)定位軸定位,以上下盤壓緊時機為基準,計算打孔定位次數;
(2)Y軸定位,以打孔完畢時機為基準,計算Y軸定位次數。
E5=(定位次數-1)*2
通過指針的循環計算,靈活的對當前數據與下一筆數據進行比較。作為比較結果,在同一步進程序中,可以跳轉到多個對應的控制步中;以指針的方式,可以在規劃一個連續的數據區域后,完成一批動作設計。
8 結束語
本款全自動數控打孔機,具有三大特點。第一,重復的加工精度要求高(小于0.5mm);第二,浮點數運算量大;第三,加工動作靈活,需要柔性的編程,需要適時靈活的滿足客戶的擴充需求。
來源于臺達伺服驅動器的高精度和SV控制器強大的浮點數運算能力,很好地實現了玻璃打孔加工中孔距、孔數計算;利用E指針偏移,可以實現靈活擴充孔數,相鄰兩孔間依次比較等功能,可以達到靈活擴充打孔數量的柔性程序設計要求。借助臺達控制器靈活的步進程序設計,可以處理控制動作的交叉流程,提高了程序設計效率。綜上所述,該設備的控制精度和工藝要求在行業內屬于較高的水平。
此外,對于客戶工藝的熟悉程度,決定了整個控制流程的質量;設備的機械結構,也直接影響設備的控制精度。當然,相比其他成熟的自動打孔設備,該設備也有不足之處,主要表現在:校準孔的位置采用485通訊讀取伺服位置方式速率及穩定性低,PLC的控制速度較數控低;但是相比數控系統,使用臺達PLC可以保證電氣控制成本投入得到有效的控制。同時,臺達小型PLC靈活的控制程序設計,大容量程序存儲,可以滿足用戶大量、復雜的程序設計,給用戶帶來靈活的設計體驗,體現了臺達小型控制器強大的控制和運算處理能力,突顯了臺達HMI產品、伺服產品、變頻器產品的易用性和實用性。
