
步進電機(Step motor)是將電脈沖信號轉變為角位移e(或線位移S)的開環控制元件,是數字控制系統的一種執行元件。工作原理是建立在被勵磁的定子電磁鐵吸引可選轉的銜鐵產生轉矩而旋轉,即靠磁鐵引力作用把電磁能轉換成機械角位移。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率
和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。脈沖的個數決定了轉角的大小,而脈沖的頻率決定了電機的轉速。這一線性關系的存在,加上步進電機只有周期性的誤差而無累積誤差等特點。使得在速度、位置等控制領域用步進電機來控制變的非常的簡單。一般步進電機可分為二相、三相、四相和六相。
本系統步進電機選用深圳偉力驅動有限公司的VID29系列二相汽車儀表步進電機。 vID29-XX/VID29~xXp儀表步進電機是一種精密的步進電機,內置減速比180/1的齒輪系,主要應用于車輛的儀表指示盤,也可以用于其他儀器儀表裝置中,將數字信號直接準確地轉為模擬的顯示輸出。VID29步進電機需要兩路邏輯脈沖信號驅動,其特點如下:
可以工作于3.5V一10V的脈沖下;
輸出軸的步距角最小可以達到1/120,最大角速度6000/s,輸出轉角轉動范圍為3150。可用分步模式或微步模式驅動。
選用進口優質特種材料和汽車級特殊工程塑料,同時兼顧防火等安全性能;
采用具有最低噪聲和超低摩擦效果的特殊齒形,保證了馬達的長期運轉壽命和性能。
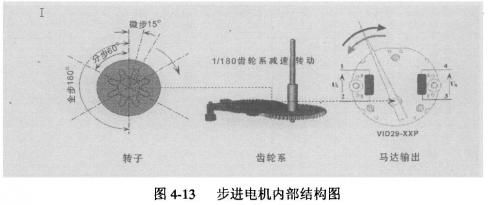
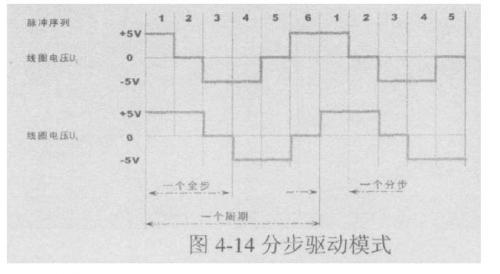
步進電機的分步驅動控制模式:VID29步進電機是經三級齒輪減速轉動輸出的,驅動要求是用標準的SV邏輯電路電壓,可以以分步驅動模式直接驅動馬達,電流需求為20mA。在分步模式下,每個脈沖可以驅動馬達轉子轉動600(即輸出軸轉動1/3度)。電機轉動的方向取決于施加在電機左右線圈上的周期性脈沖序列的相位差。如下圖所示,左線圈電壓UL相位超前于右線圈電壓UR時(相位差為/3),VID29一XX系列的電機輸出軸將順時針旋轉,VID29一XXP系列的電機輸出軸將逆時針旋轉。
分步驅動模式脈沖序列如圖4一14所示:
微步驅動模式(細分驅動)脈沖序列如圖4-15所示:

它的轉速n(或線速度v)與脈沖頻率f成正比。步距角越小,指針轉動角度越小,儀表顯示的精度越高。步距角與脈沖頻率的關系可用以下關系式來計算:
φ=180*f/(I*S)
式中φ:步進電機的步距角
f:脈沖頻率
I:電機齒輪減速比
S:驅動模式分布數(分步/微步)
步進電機的位置和速度由導電次數(脈沖數)和頻率成一一對應關系,而方向由導電順序決定。
由于H128內部集成了6個步進電機驅動模塊,所以無需擴展電路即可實現步進電機與H128硬件接口電路的連接。通過分布驅動模式,每個脈沖可驅動步進電機轉動1/3度,滿足汽車儀表的精度要求(如需更高精度,可通過擴展微步驅動芯片,使步進電機每個步為1八2度)。步進電機與H128的硬件連接如圖4一16:

圖中PUO一PU7,PVO一PV7,PWO一PW7直接與H128的輸出引腳連接。由于各步進電機直接由H128驅動,所以可以通過修改程序數據輸出接口辦法改變步進電機布置。
4.8 復位電路及E2PROM設計
單片機系統通常是在一個特定的客觀環境下為完成或實現某種功能而設計的,因此系統處于工作狀態時,勢必會受到各種外界干擾因素的影響。這種外界干擾因素會導致系統內部數據出錯,甚至會嚴重影響程序的運行,使單片機受到干擾失控導致導致程序跑飛或陷入死循環,通過采取一定的軟硬件措施使程序脫離死循環或重新運行。
本系統采取了外擴芯片實現的硬件方式,選取xlc0R公司的x5045[sll。集成了看門狗定時器、EZPROM數據存儲器、和電源監測為一體,采用SPI的方式與MCU相連,用于低電壓復位信號的單片機(H128為低電壓復位)。因其體積小、占用UO口少等優點已被廣泛應用于工業控制、儀器儀表等領域 。
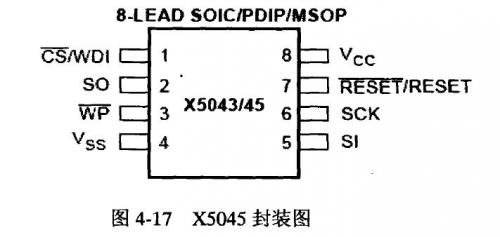
CS:芯片選擇輸入端,當CS為低電平時芯片處于工作狀態
50:串行數據輸出端,在串行時鐘的下降沿,數據通過50端移位輸出
Sl:串行數據輸入端,數據在串行時鐘的上升沿鎖存
SCK:串行時鐘,,為數據讀/寫提供串行總線定時
WP:寫保護輸入端,當WP為低電平時,向X5045的寫操作被禁止,但器件的其他功能正常。
RESET:復位信號輸出端。
x5045除了wTD(看門狗)功能外,另一個重要的基本功能就是作為EZPROM數據存儲器使用,內部包含 512xs的串行EZPROM,以保證系統在掉電后仍可維持重要數據不變。x5045與H128采用SPI總線接口連接方式,程序,獲得準確的脈沖累計計數,并將此值傳送給X5045存儲。X5045是理想的自動貯存非易失性SRAM,內部含有EEPROM,存儲容量256bit,能夠在失去vCc的時候自動執行存儲操作 (SRAM—EEPRoM),非常適合對里程的累計記錄。芯片內部包含一個指令移位寄存器,該寄存器可以通過SPI來訪問。X5045與H128連接的電路如圖4一18所示:

其中PKO一PK3、RESET分別與H128上相應的管腳相連。
4.9 其他外圍器件電路設計
4.9.1 晶振電路
本系統所用的晶振為SMHZ,分別對應接到H128單片機的引腳XTAL和EXTAL上,然后利用其內部壓控振蕩器和鎖相環(PLL)把這個頻率提高到25MHZ,作為單片機工作的內部總線時鐘。
4.9.2 儀表背光調節電路
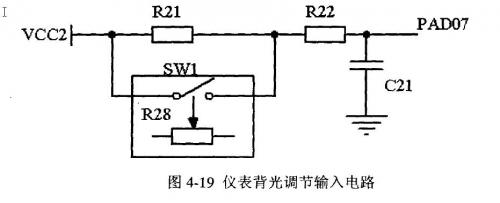
儀表背光在汽車啟動后常亮,駕駛員可根據各環境下外部光線的明暗度對汽車儀表的背光進行調節,以達到最合適的感官效果。儀表背光電路通過調節電位器改變電阻值,從而改變電流的大小,MCU根據接受到的信號的值來改變PWM脈寬占空比的輸出,從而改變背光的明暗度1401.調節電路圖如圖4一19:
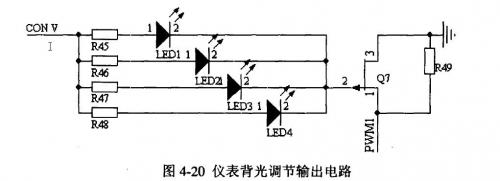
其中開關SWI為一可調電阻,通過改變電阻的大小控制電流,輸出到H128的A/D轉換接口RAD07,MCU根據周D轉換后的數據調整PWMI的輸出占空比,輸出接口CONV得到的模擬量和占空比有關,如占空比為1:1,則得到的電壓值就為Vmax的1/2,即2.5v.占空比的改變使得輸出電壓變化,從而使儀表背光顯示的亮度改變131].輸出背光調節電路如圖4一20:
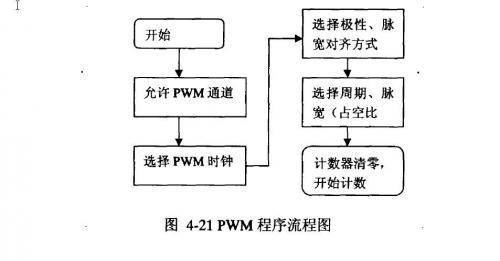
其程序流程圖比較簡單,直接在此進行了分析,如圖4一21所示:
4.9.3 狀態指示燈電路在汽車儀表的電路
設計中,一般根據外圍電子元件的布置采用正控(開關控制正極電路)和負控(開關控制負極電路)相結合的方式來控制各種狀態指示燈,同樣在本儀表也采用了這種設計方法。功能指示燈都采普亮的發光二極管,而儀表照明則采用的高亮度發光二極管,分有紅、黃、綠三種顏色,對應不同的顯示和警告信息。發光二極管及其對應的限流電阻,我們都采用了貼片封裝的元件。
同時,發動機出現故障后,如發動機水溫過高,由MCU控制對應的故障燈會閃爍。發動機出現故障,其指示一般顯示為紅色,并伴隨有蜂鳴器報警。
4.9.4 語音報警電路
設計本儀表系統有蜂鳴器報警模塊,主要是為了提醒駕駛員注意相關的危險信息,如:水溫過高,水位過低,機油壓力過低、變速箱故障等等。MCU將采樣得到的數據與存儲在EZPRoM單元中的允許數值變化范圍比較,如果超過額定范圍,則發出信息到輸出端口,蜂鳴器報警,同時對應的報警指示燈閃爍。在下次的采樣過程中,如果采集的數據在額定范圍之間,則蜂鳴器解除報警,狀態指示燈熄滅。
本系統選用的蜂鳴器為頻繁短促鳴叫,頻率為2.6KHz,音量大小為75db.由于系統UO端口資源非常豐富,可以共用一個端口,也可以單獨占用一個端口,單獨占用端口,有利于故障維修檢查,本系統在H128上預留BPO一BP3為報警電路輸出端口。
4.9.5 時鐘發生器
電路RTC模塊(實時時鐘電路)有巧個內存映射寄存器,通過秒、分鐘、小時計數器提供的時間;通過星期、日、月份、年提供日歷功能。以上計數器每次加1時都可以產生中斷,并分別對相應的中斷標志置位,如果相應的中斷被允許則可以產生CPU中斷請求。
用于驅動時間和日歷的IHZ時鐘使內嵌的補償單元能夠補償晶振的誤差,這樣通過頻率補償機制能夠使IHZ時鐘獲得用于驅動整個模塊的晶振更高的精度。
補償值可以在模塊的校準操作時通過應用軟件設置或自動獲取澎].計時功能是通過一個時鐘頻率為128Hz(CGMXCLK/256)的計數器來實現的。
這個計數器可以在任何時候開始、。停止和清除。這個計數器的值被換算到looHZ對應的值,并存儲到計時數據寄存器中(chronographdatarcgister)。因此,數據寄存器中的值為O一99,每增加1代表1/1005(loms)。數據寄存器的值滿足以下關系式:S=「(128HzeountervalueX25)+16]/32計時計數器的精度是士sms.
4.10 PCB板的設計
在以往儀表電路設計過程中,儀表的電路通常是在儀表背后附上一層軟性塑料(撓性塑料),在塑料上覆銅進行電路連接,這種接法通常適用于比較簡單的電路。由于電子技術的發展,軟性塑料已不能滿足儀表功能繁多的要求,并逐漸為
硬質板取代。也就是印制板,通常所說的PcB板 。
電路板設計與電路圖設計不同之處在于,電路板屬于比較實體化的東西,而電路圖屬于比較抽象的東西。所以,在設計電路圖時,比較著重于電路的電氣性質。而在設計電路板時,比較著重于電路的實際尺寸與空間配置(立體)。下面就電路板的設計分為以下幾步;
第一步,先設計電路圖,確定元件的排序和元件的封裝(Footprint),然后通過程序所提供的ERC檢查。
第二步,電路圖設計完成后,利用CreateNetlist功能產生網絡表。
第三步,進入PCB編輯器,首先定義板框,即板子的大小、板層數與形狀。
第四步,加載網絡表,如果網絡表(或電路圖)有錯誤,或接口上的問題,將會在此階段中出現。可以根據產生的錯誤,重新會到電路圖進行修改。
第五步,布置元件,這項工作是電路板設計中最基礎、最麻煩也是影響最大的工作。
第六步,定義設計規則,進行手工布線或自動布線。
第七步,完成布線后,進行設計驗證檢查。如果沒有發現錯誤,即可存盤輸出。
印制板通常有紙質覆銅板、環氧樹脂板、玻纖板等,在這里考慮到價格的因素以及性能的要求,我們選取環氧樹脂板,其價格適中,也能滿足汽車運行的工作環境,PCB采用雙面布線,并在部分信號電路增加焊盤測點,以利于儀表電路功能的檢測,減少故障返修率。