
摘 要: 雙星定位導航系統" title="雙星定位導航系統">雙星定位導航系統是我國" title="我國">我國自主研制的定位導航系統,研究雙星定位導航系統衛星信號" title="衛星信號">衛星信號的捕獲是實現衛星信號正確接收和處理的前提,所以研究并實現衛星信號的捕獲對保證定位精度和接收機的性能指標有重要意義。闡明信號捕獲原理,在此基礎上提出了一種捕獲電路的設計方案,針對此方案進行關鍵性能指標分析。
關鍵詞: 雙星定位導航系統 捕獲 偽碼
?
雙星導航定位系統是我國自主研發的、具有獨立知識產權的衛星導航定位系統。它解決了我國在衛星導航定位領域從無到有的問題。目前此系統正服務于我國的國民經濟建設和國防建設。用戶接收機作為雙星定位導航系統的重要組成部分,其性能直接影響著用戶的使用。接收機信號處理部分的一個關鍵是偽碼解擴,而偽碼解擴的完成又依賴于載波和偽碼的成功捕獲,同時信號捕獲的捕獲時間" title="捕獲時間">捕獲時間和捕獲帶寬將對接收機性能有非常大的影響。本文針對接收機信號捕獲原理進行分析,在此基礎,對捕獲電路進行設計,并對其捕獲性能指標進行分析。
1 捕獲原理
雙星定位導航系統是OQPSK調制的直擴系統,因此信號的捕獲要在頻域和碼域的二維空間進行。
對于OQPSK調制載波信號,因其是抑制載波信號,沒有載波頻率分量存在,無法從所接收的信號中通過濾波的方法得到參考的載波[4],所以頻域的信號捕獲重點就是如何得到一個與接收載波同頻同相的參考載波。圖1是利用數字鎖相環實現載波非相干解調。NCO在誤差信號控制下產生與衛星載波同頻的信號wo,通過鑒相器將相位誤差信號we=wi×wo 轉換成電壓控制信號并通過LP環路濾波后控制NCO輸出,通過NCO的負反饋使其逐漸減小到零,這時wo就是接收的衛星載波wi的一個拷貝,從而實現了載波信號的捕獲。
雙星衛星信號碼相位的捕獲依據m序列的自相關特性實現。m序列的自相關函數表達式如下:
Tc是碼片" title="碼片">碼片寬度,p是m序列周期,τ是時間偏移量即相位的偏差。從函數表達式可以看出,自相關函數是二值函數。接收機內部的m 序列發生器產生衛星碼的一個拷貝,將此拷貝的碼和接收的衛星碼做相關運算,根據相關值和設定的門限值(圖2中a點)比較來判斷碼的捕獲情況。當衛星碼與拷貝的碼相位偏差大于一個碼片,即Tc≤τ≤(p-1)Tc,它們的相關值最小為 ,這時衛星碼完全不能捕獲。移動本地拷貝碼時鐘,每移動一次做一次相關運算和判定。當拷貝的m 序列與衛星碼相位差τ≤Tc,隨著τ減小,相關值逐漸增大。當相關值大于門限點a 處值時,碼捕獲成功。從相關函數波形可以看出,在拷貝碼一個周期T內,拷貝碼只有其某一個相位和衛星碼相位才可能有大于門限點a 的相關值,如果拷貝碼的所有相位點處都與衛星碼做了相關,仍然沒有找到大于門限的相關峰值,那么捕獲失敗。
,這時衛星碼完全不能捕獲。移動本地拷貝碼時鐘,每移動一次做一次相關運算和判定。當拷貝的m 序列與衛星碼相位差τ≤Tc,隨著τ減小,相關值逐漸增大。當相關值大于門限點a 處值時,碼捕獲成功。從相關函數波形可以看出,在拷貝碼一個周期T內,拷貝碼只有其某一個相位和衛星碼相位才可能有大于門限點a 的相關值,如果拷貝碼的所有相位點處都與衛星碼做了相關,仍然沒有找到大于門限的相關峰值,那么捕獲失敗。
2 捕獲電路設計
雙星系統用戶接收機接收S頻段的兩顆衛星播發的信號,每顆衛星各有2個信道,即為波束1~4,這些信號空分覆蓋我國國土的東經95°~125°,北緯25°~40°地區。因此信號捕獲最多能捕獲到4個波束。實現時可以采用并行捕獲4個波束,也可以串行捕獲,通過降低單波束的捕獲時間來減少總的捕獲時間。在考慮資源和捕獲時間做折中情況下,本文采用并行捕獲方式分別捕獲4個波束的衛星信號,對每個波束實行串行捕獲方式。Riter已經證明,捕獲低信噪比的抑制載波信號的最佳裝置是Costas環和平方環。Holmes J.K 已經證明了這兩種環路是等效的[1]。捕獲電路如圖3。

接收信號經過射頻模塊后,輸出中心頻率為fi=12.24MHz的模擬中頻信號,在不考慮噪聲和多普勒影響前提下:

(3)式中,A是信息符號,m(t)是擴頻序列,wi=2πfi為載波中頻角頻率,△Φ為接收信號和本地信號瞬時相位差。經過數字解正交并與本地載波相關后
至此完成載波剝離,在信號的成分中只有載波的相差。利用PN碼的自相關性,實現解擴

經過門限判決沒有鎖定衛星信號時候,移動PN碼時鐘,使得PN碼自相關值接近1,因此有:
通過鎖相環的負反饋作用使得(13)式中的逐漸減小到載波捕獲所能接受的值,從而達到載波捕獲的目的,以進行載波的精密同步即載波跟蹤。
在載波剝離后,衛星信號與本地產生的PN碼的拷貝進行相關運算,在1個比特時間內,把相關積分的結果與預設的門限進行比較,同時清除本次相關結果,通過移動PN碼時鐘,準備下一個碼片的判決。在(11)式中,在載波已經捕獲下,△φ很小,所以cos(△φ)近似為1,因此用Q路輸出可以簡化為Q≈![]() ·s(t)。這里只有數據信息,從這里可提取幀同步和位同步標志,從而解調出正確的衛星導航定位信息。
·s(t)。這里只有數據信息,從這里可提取幀同步和位同步標志,從而解調出正確的衛星導航定位信息。
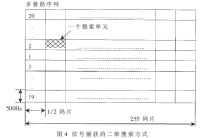
從以上對雙星導航定位系統的信號捕獲電路的分析可以看出,衛星信號的捕獲是在載波和碼相位域二維同時進行的。500Hz的頻率步進與1/2個碼片精度構成一個信號的搜索單元,搜索方式如圖4。
3 捕獲性能指標分析
捕獲時間和捕獲帶寬是信號捕獲電路的兩個重要的性能指標,它影響著捕獲電路的捕獲速度和捕獲能力。下面就這兩個指標分別進行分析。
3.1 捕獲時間
雙星系統是地球同步衛星,所以可以忽略衛星與地球間微小的相對運動。在考慮地面載體300m/s 的動態下,對于S頻點的雙星接收機,其多普勒頻率大約為2.5kHz。因此衛星信號的頻率搜索范圍可在10kHz內進行。對于碼相位以1/2碼片精度進行搜索,需要搜索510個相位點。同時,考慮到以16kbps的信息速率,需用62.5μs的積分時間,所以搜索完所有的相位點所需要時間為510×62.5μs=31.875ms 。對于同時進行的頻域搜索,以500Hz的精度步進,則需要搜索20次,因此捕獲時間為20×31.875=637.5ms。碼失鎖后,由于載波已經鎖定,且本地晶振短期穩定度較高(如10-7),這樣中斷30s后,時間不確定度為±3000ns,大約對應±12個chip,考慮±15個chip的搜索長度,同樣以1/2碼片步進進行搜索,則需要重捕時間為30÷![]() ×62.5μs=3.75ms。保守地考慮系統的相應時間,信號的捕獲時間遠遠滿足1s的指標要求。
×62.5μs=3.75ms。保守地考慮系統的相應時間,信號的捕獲時間遠遠滿足1s的指標要求。
3.2 捕獲帶寬
捕獲帶寬是環路能夠通過捕獲過程而獲得衛星信號的粗同步所允許的最大固有頻差△f0max。若環路的捕獲帶寬小于最大固有頻差,則不能實現信號的捕獲。本捕獲電路輸入信號和捕獲電路采用同一個高精度的本振,因此可以忽略由于不同頻率基準而引入的誤差。如前所述,在考慮運動載體300m/s 的動態下,有大約2.5kHz的多普勒頻率。所以輸入信號的變化范圍可以確定為±2.5kHz,滿足捕獲要求即為△fn>△f0max=2.491kHz。下面分析本捕獲電路的捕獲帶寬△fn。為了減少噪聲引起的相位抖動,選取環路的噪聲帶寬與信息速率之比為0.1[1]。在雙星系統中信息速率為16kbps,環路噪聲帶寬BL可以取1.6kHz。在考察載波參考相位抖動和解調損失條件下取BL為950Hz,
C/N0:系統的載噪比。在雙星系統中天線的口最小功率為156.7dBw,天線增益為0dB,工作溫度為50°下,系統的載噪比為46.7dB。
2BI:環前的中頻帶寬。BI取信息速率的2倍即為32kHz。
通過以上對雙星導航定位系統衛星接收信號捕獲原理分析,建立了應用比較廣泛的捕獲電路,并對本電路的主要性能指標進行了詳細分析,最終結論表明,此電路的性能指標滿足雙星系統的應用要求。
參考文獻
1 張 欣.擴頻通信數字基帶信號處理算法及其VLSI實現[M]. 北京:科學出版社,2004
2 王福昌, 魯昆生.鎖相技術[M].武漢:華中科技大學出版社,1997
3 馮玉珉. 通信系統原理(第一版)[M]. 北京:清華大學出版社.北方交通大學出版社, 2003
4 郭 勇.雙星定位系統擴頻信號捕獲跟蹤及相關技術研究.西南交通大學學報,2002;(12)