
摘? 要: 吸取PID算法的基本思想,利用PLL的高精度和高靈敏度,從時域調參的角度提出了一種新的前端控制回路——PPLID控制回路,并介紹了其在FIRA機器人小車控制系統" title="控制系統">控制系統中的應用。
關鍵詞: 鎖相" title="鎖相">鎖相積分環? PID? PLL? PPLID? 全功率" title="全功率">全功率提前補償
?
1 對PID的新需求
PID算法具有結構簡單、物理意義清晰、便于實現的優點,因而成為當前工程應用中最普遍和最經典的控制算法。但是參數整定" title="參數整定">參數整定一直以來都困擾著工程技術人員。
一方面,由于PID算法常用于前端控制回路,因而在一個較大的系統中往往有幾十乃至幾百個PID回路,這使得參數調整十分繁瑣。若各個回路間存在耦合關系,則工作量更是難以預計。
另一方面, PID算法的應用場合十分廣泛,而不同場合的控制參數卻又不盡相同,因此針對某個被控對象設計的PID電路很難適應另一個被控對象的要求。這使得PID控制系統長期停留在通用算法的層次,難以提升為價格低廉的通用IC。隨著EDA工具的發展,SOC的市場需求日益增長,算法集成化的趨勢日益明顯,在工業控制領域的表現之一就是對通用PID集成電路的需求越來越強烈。
上述兩方面使得PID的廣泛應用和參數整定過于繁瑣的矛盾日益突出。要解決這個矛盾,實現PID算法集成化,必須找到一個簡便靈活的參數整定方法。
同時,隨著工業控制對精度和抗干擾的要求越來越高,高頻微擾的問題日益突出。經典PID算法采用積分前置的方法來減小高頻微擾的問題。但由于積分效應,必然削弱微分的預測補償能力,從而影響系統的精度和靈敏度。采用新的方法克服高頻微擾,也是一個亟待解決的問題。
2 PLL與PID結合對性能的改善
PLL在頻率合成、通信以及標準信號發生器中被廣泛應用,具有一整套成熟的理論,是相當經典的電路,其高靈敏度和高精度已被理論和實踐證明。可將PID和PLL有機地結合起來,利用PLL的優異性能改進傳統PID電路。
2.1 PLL與PID結合構成PPLID
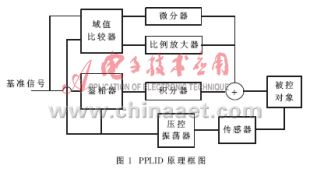
PLL本身可以看成一個鎖相積分環。其中的鑒相器" title="鑒相器">鑒相器承擔了差值計算和相位跟蹤的任務(計算標準信號與反饋信號的相位差);積分器則不僅完成了積分功能,還肩負著保持當前狀態的任務;而壓控振蕩器(VCO)則負責將被控對象信息反饋回鑒相器[2]。可見,這個環路已經具備了差值計算和積分的功能,只要再配以比例和微分調節,就構成了一個新穎的控制回路。由于其中含有鎖相積分回路,因此稱其為PPLID(Proportional, Phase-Locked-Integral and Differential Controller,即比例、鎖相積分、微分控制器),其原理如圖1所示。
?
?
??? 其中的核心部件是鎖相積分環,實際上就是一個PLL,代替PID中的積分器和減法器。若差值大于一定域值,則啟動微分和比例調節;若差值小于域值,則只有鎖相積分器處于工作狀態,由它完成精細調節。基準信號就是控制量,這里它表現為頻率波形。
PPLID吸收了經典PID的基本思想,因此可應用于經典PID回路所能涉及的所有領域,其優越性表現在以下四個方面:
①利用鑒相器作差值運算,大大提高了PPLID的靈敏度和精度。
鑒相器可以采取邊沿對齊的方式來實現相位跟蹤,即標準脈沖信號和反饋脈沖信號都輸入鑒相器。只要邊沿不對齊,則鎖相積分環就會設法調整被控對象,直到二者的邊沿完全對齊。因此,鎖相環的靜態精度和靈敏度非常高。
②PPLID中積分器的平均積分時間很短。
鑒相器計算出來的相位差最終是通過積分器轉變為電壓直接輸出到被控對象上的。也就是說,積分器能夠根據相位差決定在當前累積電壓的基礎上將電壓調高或調低多少。由于鑒相器的高靈敏度使得相位稍有偏離便開始調整,因此積分器每次將電壓調高或調低得很小,從而在很短的時間內就能完成調整工作。即鎖相積分器的平均積分時間是很短的。
③PPLID利用微分和比例調節可以實現全功率提前補償。
控制系統多處于微擾環境中,但有時會出現沖擊干擾,差值會瞬間變得很大,僅依靠鎖相積分環就不能足夠快地收斂到目標值。這時可以啟用微分和比例調節,對被控對象進行全功率提前補償。這里的全功率指的是采用最高電壓或最大電流對被控對象進行補償,因此這種提前補償的持續時間不會很長,只要偏差小于某個閾值,便立即停止,從而將精細調整的工作交給鎖相積分環來完成。
④PPLID可用于高精度控制。
????由于嵌入了PLL,因此PPLID繼承了PLL回路的高精度特性,完全能勝任要求高精度控制的任務,成本也十分低廉。
2.2 PPLID對傳統PID回路性能的改善
2.2.1 對高頻微擾適應能力的改善
如前所述,PPLID具有靈敏度高和平均積分時間短的特點,稍有偏差便進行小幅調整,因此對高頻微擾具有天然的自適應能力。
同時,由于微分器只在沖擊干擾時才會啟用,在高頻微擾情況下是停止工作的,因此不存在高頻微擾對微分器產生影響的問題。
2.2.2 對PID參數整定的簡化
PPLID對PID參數整定的第一個簡化是免去了微分和比例調節系數的調整。
在PPLID中,只有當差值大于閾值時才會啟動微分和比例調節,進行全功率提前補償。當差值小于某個值時,則立即停止微分和比例調節,從而將精細調節的任務交由PLL承擔。可見,PLLID中的比例和微分調節并不負責精細調節,只負責將大幅度的偏差縮小到一定范圍內,因此其系數對精度是無關緊要的。這樣就免去了微分和比例系數的調整。
參數整定的第二個簡化是對積分系數的要求大大寬松了。這種寬松性表現為:只要鎖相積分器的延時小于被控對象的反應延時,環路就能夠糾偏,而且能夠及時精確地糾偏。說它能夠糾偏是因為采取邊沿對齊方式的PLL,其捕捉范圍并不依賴于積分器的延時常數[3],這意味著在小幅振蕩的情況下,鎖相積分環的收斂性與積分常數的關聯很小,只要保證環路對輸出控制量(即積分器的輸出)的調整速度快于被控對象的變化,就能夠穩定在目標控制量。顯然決定環路調整快慢的是最長延時單元,也就是積分器,只要其積分延時小于被控對象的反映延時,環路就能糾偏。說它能及時精確地糾偏是因為鑒相器的高精度和高靈敏度使得鎖相積分環的平均積分時間很短,這意味著在偏差很小的情況下,環路能立即進行調整。
??? 在控制系統中,被控對象多為機械運動或溫度、壓力和流量等物理變化。其反應延時一般總大于積分器的延時,因此要調整積分延時使其小于被控對象的反應延時是十分簡便的。
由上可見,PLL與PID相結合,參數整定實際上就歸結為延時參數的調整。這種調整無需在Z域進行分析,只要在時域直接進行即可(對于積分器,即調整電容和電阻值),這樣就大大簡化了參數整定。
參數整定的簡化,不僅提高了PID回路的調試效率,而且為設計價格低廉的集成PPLID電路提供了可能。整個電路唯一需要根據工作環境進行調整的就是積分器的延時參數,只要將積分器留給用戶調整,就能使得芯片應用于多種場合。
3 PPLID在FIRA中的應用
在FIRA足球機器人小車的前端控制器中應用了PPLID回路,取得了較好的效果。其實現如圖2所示(這里只提供了小車左輪的電路,右輪與此對稱)。由于傳感器返回的信號是頻率信號,可以直接輸入到鑒相器的反饋端,因此無需使用壓控振蕩器。
?

?
3.1 AVR單片機
本系統采用ATMEL公司AVR系列單片機中的AT90S8515作為前端控制器,它除了產生標準信號、管理與上位機的無線通信、實現動態控制算法外,還擔負PPLID中的閾值比較、啟用和關閉微分調節等任務。
3.2 鎖相積分回路
鎖相積分回路就是一個PLL,其鑒相功能直接由CD4046的比較器Ⅱ實現,最高工作頻率可達1.4MHz。PLL內部集成了兩個相位比較器Ⅰ和Ⅱ,這里使用的是相位比較器II。它是一個由信號的上升沿控制的數字存儲網絡,對輸入信號占空比的要求不高,允許輸入非對稱波形,具有很寬的捕捉頻率范圍,而且不會鎖定在輸入信號的諧波上。當進入鎖定狀態時,能保證兩個輸入信號之間的相移為0(關于CD4046的詳細介紹見參考文獻[3])。積分器電路采用如圖3所示的超前滯后網絡。其傳遞函數為:
G(s)=(1+τ2·s)/(1+τ1·s)
?

其中,τ1=(R1+R2)·C1,τ2=R2·C1
通過選擇合適的R1,R2和C1的值,就可以在一定范圍內設定時間常數。由于存在電機慣性,因而采用超前滯后濾波器且超前時間常數大于滯后時間常數,系統將獲得很好的穩定性。
3.3 支援驅動器
支援驅動器采納了微分調節的基本思想。微分調節實際上就是根據差值的變化來預計被控對象的變化,在本例中就是根據差值的大小,來預測當前電機轉速的偏離是否能夠快速收斂。如果單靠鎖相環不能快速收斂,則支援驅動器啟動,快速提高或降低電機控制電壓,進行全功率提前補償;當差值小于閾值時,便由鎖相積分環來完成精細調節。
3.4 測 速
電機轉速由光電碼盤測出,輸出的脈沖信號直接作為CD4046的一個輸入信號,與標準信號相比較。同時該信號也要提供給AVR,以便比較差值是否超過閾值。
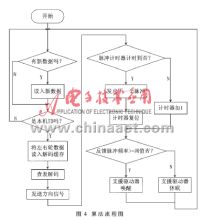
控制系統的算法可參照圖4所示的流程圖。
?
?
??? PPLID控制回路中采用的基本信號參量是頻率或相位,根據調頻或調相通信的原理,這種信號抗干擾能力強,適合遠距離傳輸,而且便于實現數字無線通信。相信PPLID在分布式控制系統中將大有作為。
?
參考文獻
1 D.F.Geiger.Phase Locked Loops for DC Motor——Speed?Control(M).John Wiley & Sons, 1981
2 周雪琴,安 錦.計算機控制系統.西安:西北工業大學出版社,1998.2
3 戴逸民.頻率合成與鎖相技術.合肥:中國科學技術大學出版社,1995.2
4 沈 雷.CMOS集成電路原理及應用.北京:光明日報出版社,1986.8
5 耿德根,宋建國,馬 潮,葉勇建.AVR高速嵌入式單片機原理與應用.北京:北京航空航天大學出版社,2001.2
6 陳隆昌,閻治安,劉新正.控制電機(第三版).西安:西安電子科技大學出版社,2000.5