
摘? 要: 介紹了32位嵌入式系統" title="嵌入式系統">嵌入式系統及應用現狀,指出了在嵌入式系統中實時圖像采集" title="圖像采集">圖像采集的重要性和存在的問題,提出了一種基于嵌入式系統總線接口的實時圖像采集模塊的實現方法。
關鍵詞: 32位嵌入式系統? CMOS攝像? 實時圖像采集
?
1 32位嵌入式系統及其應用現狀
1.1 32位嵌入式系統概述
嵌入式系統是后PC時代的主導,當低端的嵌入式系統無法滿足信息化、智能化、網絡化時代的更高要求時,32位嵌入式系統應運而生。32位嵌入式系統是電腦硬件與軟件的有機結合。嵌入式設計的目的在于滿足某種特殊的功能。嵌入式系統的大體構架可分為五部分:處理器、內存、輸入與輸出、操作系統與應用軟件。32位嵌入式系統可分為硬件和軟件兩個平臺。硬件平臺的設計包括處理器電路、網絡功能、無線通信及使用接口等的設計。嵌入式軟件為信息、通信網絡或消費性電子產品等系統中的必備軟件,為硬件產品的驅動程序、控制處理和基本接口功能服務,以提高硬件產品的價值。嵌入式軟件為該硬件產品不可缺少的重要組成部分。
1.2 32位嵌入式系統的應用現狀
嵌入式系統把微處理器(CPU)或者微控制器(MCU)的系統電路與其專用的軟件平臺相結合,以此來達到系統操作的最高效率。目前的移動電話、手表、電子游戲機、PDA、電視、冰箱等民用電子與通信設備,電動汽車、電動機車等電動產品的控制核心,無不與32位嵌入式系統息息相關。32位嵌入式系統早已融入了人們的日常生活,嵌入式系統的產品主要集中在信息家電、通信產品、工業控制器、掌上電腦(PDA)領域。家電、玩具、汽車、新一代手機、數碼相機等設備也都采用了32位嵌入式系統的核心技術。隨著后PC時代的到來,有理由相信32位嵌入式系統會呈現出蓬勃發展的趨勢。
2 實時圖像采集的重要性和存在的問題
實時圖像的采集和處理在現代多媒體技術中占有極其重要的地位。日常生活中所見到的數碼相機、可視電話、多媒體IP電話和電話會議等產品,實時圖像采集是最核心的技術。圖像采集的速度、質量直接影響到產品的整體效果。眾所周知,視頻圖像" title="視頻圖像">視頻圖像數字化后數據量非常龐大,對如此大量高速的數據進行實時處理是計算機應用領域中技術難度最大的部分。例如,一幅大小為352×288、彩色深度為16的圖像,其數據量為0.5MB。而依據人的視覺特性,25幅圖像連續播放才能使人感到一幅動態的畫面,這意味著必須要有5MB的原始數據量才能保證畫面的連續。可見如何實現視頻圖像的高保真數字化并且采取科學合理的方法實現數據的高速傳輸是該領域必須解決的首要問題。
目前大多數視頻圖像采集采用攝像頭傳感器,再通過視霸卡或實時圖像采集(壓縮)卡對視頻圖像進行采集 (或壓縮)后送入計算機進行處理。由于攝像機的輸出已轉換成模擬NTSC或PAL制式并以SVideo或混合視頻信號方式輸出,且攝像頭傳感器的象素點在輸出時序上很難與采集卡的采樣點一一對應,因此視頻圖像數字化后圖像質量損失較大,圖像分辨率上限受制式限制。另外,這種方法存在系統成本高、結構復雜等局限性,不便于推廣和普及應用。為此,最新出現了采用先進攝像技術的圖像采集卡,極大地改善了圖像質量損失較大、成本高、不便于推廣等缺點。這類先進攝像技術(如CMOS攝像技術)的采集卡的突出優點是占用計算機資源少,數據傳輸速率較高,通用性好。例如采用USB接口的攝像頭在一定程度上滿足了實時性要求,突出了采樣速率高、圖像質量高、通用性好的特點。但采用這種技術的圖像采集卡必須具有壓縮處理,且圖像大小受限制,成本隨之提高。為此,本文以OmmVision公司的OV6630芯片為例,提供一種新的基于32位嵌入式系統ISA總線接口的實時圖像采集技術,旨在充分利用其快速、圖像質量高、成本低和通用性好的優點。
3 實時圖像采集主芯片介紹
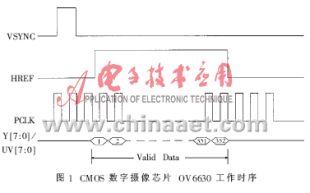
CMOS數字攝像頭芯片OV6630將CCD攝像機和相應的視頻A/D轉換及視頻輸出電路集成在一個芯片上,從而在實現高保真數字圖像的前提下顯著地降低了成本和體積。356×292的CCD陣列掃描輸出原始的R、G、B彩色圖像信號,經模擬處理電路進行曝光、校正、白電平調整等處理后,根據輸出要求還可轉換成YUV等多種信號輸出形式,其模擬視頻信號經兩路8位視頻A/D轉換后由視頻接口輸出16位的YUV或RGB 4:2:2格式的標準數字視頻圖像信號。OV6630 的視頻時序產生電路用于產生行同步、場同步等多種同步信號及象素時鐘等多種內部時鐘信號;I2C接口使外部CPU通過I2C總線控制OV6630的各種工作狀態、工作方式、數據輸出格式和讀取內部狀態信息等。CMOS數字攝像芯片OV6630的工作時序如圖1所示。
?
?
其中,VSYNC為場同步輸出脈沖,HREF為行同步輸出信號,PCLK是用來鎖存" title="鎖存">鎖存有效數據的時鐘(當系統時鐘為17.73MHz時,PCLK為8.86MHz),即象素時鐘,Y[7:0]是8位亮度數據總線,UV[7:0]為8位色度數據總線。
4 實時圖像采集框圖及工作原理
本圖像采集模塊基于Intel StrongARM SA1110 32位高端嵌入式CPU,CMOS攝像頭芯片采用OmmVision 的OV6630,可編程邏輯器件是Xilinx公司推出的CPLD芯片XCR3128XL。實時圖像采集模塊框圖如圖2所示。圖像采集卡由五大部分組成:CMOS攝像頭電路、CPLD控制、鎖存器" title="鎖存器">鎖存器、SRAM存儲器和32位嵌入式系統總線接口。
?

?
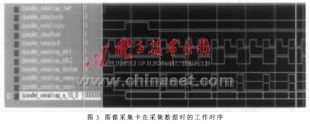
圖像采集卡的工作原理為:系統上電時,只要攝像頭OV6630的電源使能信號(PWDN)為低電平,它就處于正常的工作模式,即OV6630的Y[7:0]和UV[7:0]信號線上就會輸出圖像數據;接收到來自CPU的有效采集啟動信號后,可編程邏輯器件CPLD會判斷OV6630的場同步信號(VSYNC)是否為1,若為1,則復位地址線,即保證地址線A[16:0]=00000000000000000,而此17位地址線直接與存儲器SRAM的地址信號線相連,選通SRAM準備存儲數據。當VSYNC信號為0、行同步信號HREF為1,且象素時鐘PCLK信號處上升沿時,可以使鎖存允許信號為低電平,同時使鎖存器的時鐘信號1上產生一上升沿,將第一個象素點的數據Y[7:0]和UV[7:0]鎖存進鎖存器1。由于CPU采用32位的數據總線,而每個象素點的數據是16位的,所以本設計在CPLD中做一個用來指示象素奇偶的計數器,將奇數象素點的數據鎖存在鎖存器1中,將偶數象素點的數據鎖存在鎖存器2中。等到“湊齊”了32位的圖像數據,再將存儲器片選信號CAP_RAMCS和存儲器寫信號CAP_RAMWR同時拉為低電平,則32位數據就存儲在存儲器SRAM中。其仿真時序如圖3所示。CPLD還完成一幀圖像(352×288或176×144)象素點數的計數。當采集完一幀圖像后,CPLD產生一中斷請求信號,通知CPU可以讀走數據。如果得到CPU發出的中斷響應,則中斷響應信號有效(低有效)。CPLD在收到中斷響應信號后,使存儲器片選信號和存儲器寫信號同時為低電平,CPU讀取數據,直到讀完一幀圖像數據,其仿真時序如圖4所示。
?
?

?
本設計是基于32位嵌入式系統的實時圖像采集,其突出的優點是:圖像質量無損、實時性強、接口電路簡單、可擴展性強。由于該圖像采集卡體積小,可應用于可視電話、多媒體IP電話等手持式或便攜移動式圖像處理設備。更重要的是它為嵌入式系統中視頻圖像捕獲提供了另外一種新的方法。只要做一簡單的接口變換電路就可以很方便地移植到不同的符合總線接口的嵌入式系統中,具有一定的應用和研究價值。
?
參考文獻
1 Advanced Information Preliminary Ov6630/Ov6130. Version 1.0.2000;3(4)
2 秦石喬.CMOS數字攝像IC及其在視頻圖像采集中的應用.計算機工程,1999;(5)