
0、引言
目前125 kH z讀卡器的技術相對成熟,系統價格便宜,在各個行業得到了廣泛應用,例如: 人員的身份識別,物品的信息管理,液化氣的管理,動物的識別,酒店的門禁管理等用唯一識別號可以標識物體屬性的地方都有應用。在一些應用場合10多毫米的讀卡距離不能滿足遠距離讀卡的要求,為此本文提出了一種基于AD過采樣技術的曼徹斯特解碼方式,較現有的方波解碼方式讀卡距離有了大的提高,配合大尺寸的振動線圈,讀卡距離超過了1 000 mm。
1、系統的構成
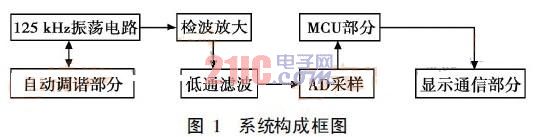
系統的組成結構如圖1所示,125 kH z的振蕩電路,檢波放大電路,自動調諧電路,低通濾波電路,這幾部分構成了整個讀卡器的射頻通信控制,m cu部分,AD采樣部分構成了系統的核心,這兩個部分完成了振蕩系統的自動調諧,卡片數據的解碼,數據的發送、顯示等功能。
2、曼徹斯特編碼原理
曼徹斯特編碼(M ancheSTer Encod ing),也叫做相位編碼( PE),是一個同步時鐘編碼技術,被物理層使用來編碼一個同步位流的時鐘和數據。曼徹斯特編碼被用在以太網媒介、無線鏈路等系統中。曼徹斯特編碼提供一個簡單的方式給編碼簡單的二進制序列,而沒有長的周期,沒有轉換級別,因而防止時鐘同步的丟失,或來自低頻率位移在貧乏補償的模擬鏈接位錯誤。在這個技術下,實際上的二進制數據被傳輸通過這個電纜,不是作為一個序列的邏輯1 或0 來發送的( 技術上叫做反向不歸零制( NRZ) )。相反地,這些位被轉換為一個稍微不同的格式,它通過使用直接的二進制編碼有很多的優點。
在曼徹斯特編碼中,每一位的中間有一跳變,位中間的跳變既作時鐘信號,又作數據信號; 曼徹斯特編碼從高到低的跳變是0 從低到高的跳變是1。還有一種是差分曼徹斯特編碼,每位中間的跳變僅提供時鐘定時,而用每位開始時有無跳變表示0 或1 ,有跳變為0 ,無跳變為1 。
兩種曼徹斯特編碼是將時鐘和數據包含在數據流中,在傳輸代碼信息的同時,也將時鐘同步信號一起傳輸到對方,每位編碼中有一跳變, 不存在直流分量, 因此具有自同步能力和良好的抗干擾性能。但每一個碼元都被調成兩個電平,所以數據傳輸速率只有調制速率的1 /2。
3、過采樣技術原理
采樣頻率超出信號帶寬的兩倍, 用數字濾波器替換性能不好的模擬抗混疊濾波器, 這個過程稱為過采樣。AD 轉換的過采樣技術一般分三步: ( 1) 高速(相對于輸入信號頻譜)采樣模擬信號; ( 2) 數字低通濾波; ( 3) 抽取數字序列。
采用這項技術, 既保留了輸入信號的較完整信息, 降低了對輸入信號頻譜的要求, 又可以提高采樣子系統的精度。
3. 1 奈奎斯特采樣定理
根據奈奎斯特采樣定理, 需要數字化的模擬信號的帶寬必須被限制在采樣頻率fs的一半以下, 否則將會產生混疊效應, 信號將不能被完全恢復。這就從理論上要求一個理想的截頻為fs/2的低通濾波器。實際中采用的通頻帶為0 ~fs/2的低通濾波器不可能既完全濾掉高于fs /2 的分量又不衰減接近于fs/2的有用分量。因此實際的采樣結果也必然與理論上的有差別。如果采用高于fs的采樣頻率, 如2fs, 則可以很容易用模擬濾波器先濾掉高于1. 5fs的分量, 同時完整保留有用分量。采樣后混入的界于0. 5fs~ 1. 5fs之間的分量可以很容易用數字濾波器來濾掉。這樣輸入模擬濾波器的設計將比抗混疊濾波器簡單的多。
3. 2 量化與信噪比
模擬信號的量化帶來了量化誤差, 理想的最大量化誤差為+ /- 0. 5LSB。AD轉換器的輸入范圍和位數代表了最大的絕對量化誤差。量化誤差也可以在頻域進行分析, AD轉換的位數決定了信噪比SNR; 反過來說提高信噪比可以提高AD轉換的精度。
假設輸入信號不斷變化, 量化誤差可以看作能量均勻分布在0~ fs /2上的白噪聲。但是對于理想的AD轉換器和幅度緩慢變化的輸入信號, 量化誤差不能看作是白噪聲。為了利用白噪聲理論, 可以在輸入信號上疊加一連續變化的信號, 叫做?? 抖動信號 , 它的幅值至少應為1LSB。
3. 3 疊加白噪聲提高信噪比
由于量化噪聲功率平均分配在0~ fs/2, 而量化噪聲能量是不隨采樣頻率變化的, 采用越高的采樣頻率時, 量化噪聲功率密度將越小, 這時分布在輸入信號的有用頻譜上的噪聲功率也越小, 即提高了信噪比。只要數字低通濾波器將大于fs/2的頻率分量濾掉, 采樣精度將會提高。
采用疊加白噪聲進行的過采樣在每提高一倍采樣頻率的情況下可以將信噪比提高3 dB 或者說增加半位的分辨率, 對于精度要求不太高的系統是不錯的選擇。這種方式需要通過某種方法產生白噪聲, 有時AD轉換器內部的噪聲已經足夠, 也就不用外加噪聲源了。該方式對于輸入原始波形沒有限制, 尤其適合于過采樣倍數可以做的較高的系統。
4、過采樣解碼原理
只讀型125 kH z ID卡編碼規則: 芯片采用曼徹斯特編碼規則, RF周期與數據位周期的比率是RF /64, 卡片的全部數據位為64位, 包含9個開始位(全為1) 40個數據位( 8 個廠商碼+ 32個數據位)、14個行列校驗位( 10個行校驗+ 4個列校驗)、1個停止位。卡片在向讀卡器傳送數據時先傳送9個開始位, 然后傳送8個廠商碼, 然后傳送32個數據位。其中15個校驗和結束位用以跟蹤包含廠商碼在內的40位數據。
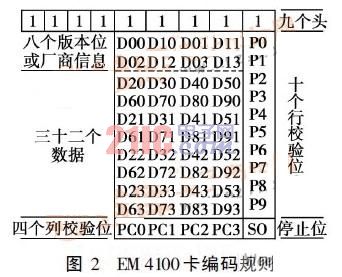
由圖2可知, 解碼的關鍵是要正確識別文件頭和其余的數據, 即正確的識別邏輯1和邏輯0, 當ID卡由遠到近接近讀卡器時, ID卡從讀卡器的電磁波輻射場獲得能量, 對電磁場進行負載調制, 發回自己攜帶的信息; 當距離比較遠時, 讀卡器接收回的信號較弱, 放大之后不能達到MC?? 可以識別的數字信號, 顯示為三角波, 而且幅值較小, 這樣必須通過AD轉換才能轉換為MCM 可以識別的數字信號。由曼徹斯特的編碼規則可知從高到低的跳變是0從低到高的跳變是1, 當信號通過低通濾波電路輸入AD轉換端時, 信號為三角波, 三角波的上升沿代表了曼徹斯特編碼的低到高的跳變,即邏輯1, 下降沿代表了曼徹斯特編碼的高到低的跳變, 即邏輯0, 上升沿和下降沿持續的時間即代表了邏輯1和邏輯0持續的時間, 有了這幾個參數后MCM 就可正確的識別ID卡的信息, 進行曼徹斯特編碼的解碼了。
5、實例應用
識別卡采用曼徹斯特編碼方式, RF周期與數據位周期的比率是RF /64, 即512 s就會有一個上跳沿或是下跳沿,從接收到的波形上看高電平或是低電平的最長持續時間為512 s(理想值), 最短持續時間為256 s(理想值)。因此通過判斷高低電平的時間, 即可還原出時鐘信號和數據。
在實際的應用中, 采用了AD 采樣速度較高, 轉換精度較高, 運算速度較高的ARM 作為主處理器, 型號為STM32F103X, 此款芯片的AD 轉換速度可到1M, 精度達到12位, 運算速度最高達到72MH z, 通過1M 速度的AD轉換,當前值和原來的值相比較即可判斷是上升沿高電平還是下降沿低電平, 通過對轉換次數的計數可以得到高電平或低電平持續的時間, 對這些數據進行數字濾波, 抗干擾處理, 得到了曼徹斯特編碼的的數字數據, 對這些數據進行處理即可正確識別還原曼徹斯特編碼波形, 然后根據曼徹斯特的編碼規則和ID卡的編碼規則即可還原ID卡所包含的信息。在理想狀態下, 電平的最短持續時間為256 s, 最長持續時間為512 s, 但由于射頻場信號的強弱和外界的影響, 最短持續時間和最長持續時間不是一個穩定的值, 因此在實際應用中, 應是一個取值范圍。例如: 最短持續時間為170 s ~360 s, 最長持續時間為400 s~ 600 s(這些取值范圍并不是固定的, 也沒有太嚴格的要求。在實際應用中, 最好對所使用的ID卡進行測量一下, 然后參考測量的結果來選取。
具體的解碼過程好多文章都有介紹, 本文就不在重復敘述。
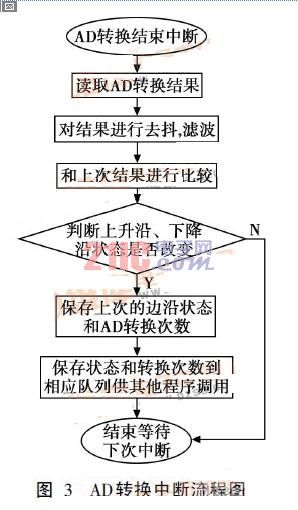
圖3為AD轉換的程序流程圖。
6、總結
通過過采樣技術和自動調諧技術的應用, 本文所設計的讀卡器成功的將讀取距離擴展到1 000 mm 以上, 讀卡穩定,探頭間不相互影響, 在實際中得到了廣泛的應用, 得到了客戶的好*。