本文著重介紹了一種改進算法,即取消相電流傳感器且采用滑模觀測器實現無位置傳感器速度控制。
永磁同步電機(PMSM)是近年來發展較快的一種電機,由于其轉子采用永磁鋼,屬于無刷電機的一種,具有一般無刷電機結構簡單,體積小,壽命長等優點[1]。
本文討論空間矢量控制的永磁同步電機,采用磁場定向算法借助DSP高速度實現對轉速的實時控制。由于控制算法必須獲取轉子位置信息,所以傳統的控制系統都需要以光電編碼器等作為轉子位置傳感器。為了最大限度減少傳感器,本文從改變相電流檢測方法,建立采用砰-砰控制的滑模觀測器,介紹一個可以實現的模型。
2 磁場定向原理
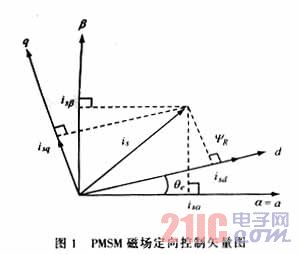
磁場定向控制,簡稱FOC。如圖1所示,兩直角坐標系:αβ坐標系為定子靜止坐標系,α軸與定子繞組a相軸重合;dq為轉子旋轉坐標系,d軸與轉子磁鏈方向重合,并以同步速ωr逆時針旋轉。兩坐標系之間的夾角為θe。可以把定子電流綜合矢量is,在旋轉坐標系 dq軸上如下式分解
is=isd+isq (1)
在交流永磁同步電機中,轉子為永磁鋼,可認為轉子電流綜合矢量的模大小不變,常用常數值IF代表。根據交流電機電磁轉矩T與定、轉子電流綜合矢量的普遍關系式[2]
式中p———極對數
L12———定、轉子互感
i1———定子電流綜合矢量
i2———轉子電流綜合矢量
δ———定、轉子綜合矢量間夾角
這樣電磁轉矩只隨|i1|和角δ變化。為了獲得簡單可控的轉矩特性,可以給定定子電流綜合矢量指令使其始終在q軸上,即δ=90°,從而得
![]()
式中Is———定子電流綜合矢量的模
按上式可以實現用定子電流綜合矢量的模來直接控制電動機電磁轉矩,從而使永磁同步電動機獲得類似直流電動機的伺服性能,并可得到快速無靜差的調節特性。圖2為系統控制框圖。

該速度控制系統由速度、電流雙閉環實現,采用的算法由相應的模塊實現,包括:Park變換模塊,Clark變換模塊,反Park變換模塊,轉子位置角估計模塊,轉速計算模塊,弱磁控制模塊,PI調節模塊,空間矢量PWM生成模塊等。整個控制系統,以DSP芯片為核心再配以簡單的外圍電路,其復雜的控制算法及功能全部由軟件來實現。其中每一個控制模塊,對應一C調用函數,主函數流程用C語言編制。與有位置傳感器的控制系統相比,無位置傳感器系統僅在對反饋量的處理中采用了轉角觀測器模塊函數,而對其他控制模塊,而系統可以以完全相同的方法實現,這更顯示了軟件構成系統的靈活性。
3 無傳感器算法
3.1 減少一路電流傳感器方法
在逆變器控制中都需要相電流信息,傳統采用的方法是直接用傳感器獲得需要的相電流,這種方法依賴負載的布置,并且至少需要兩個傳感器直接應用于電機組繞組。本文介紹的方法是僅通過采集直流側母線電流信息,來估計交流側三相電流值。因為逆變器開關狀態是我們直接控制的,所以已知輸入電流的路徑,即輸入線電流和電機相電流間的關系。這樣在通常八個開關狀態(Sa,Sb,Sc)中除(0,0,0)和(1,1,1),在其他六個開關狀態下,直流側線電流信息總對應a,b,c中某一路相電流值。

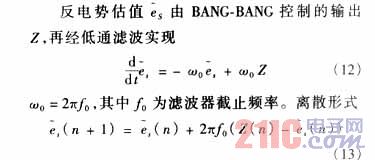
式(8)為基本電流觀測器,式(9)為BANG-BANG控制器。二者組成滑模電流觀測器,目的是通過適當選擇Z和估計反電勢,使估計電流和實測電流誤差為零。二者離散形式為

(2)估計反電勢
(3)轉子磁鏈位置θ估算
由反電勢來估計轉子磁鏈位置角,式(14)為反電勢綜合矢量表達式,可根據反電勢在α、β軸上的分量來求解轉子磁鏈位置角,即式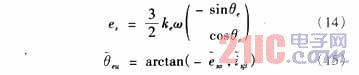
(4)轉子磁鏈位置校正
采用低通濾波器來獲得反電勢,引入了相延遲。該延遲與低通濾波器的相位響應直接相關,其截止頻率越低,對應固定頻率的相延遲越大。
基于低通濾波器的相位響應,做一個相延遲表,可以通過查表求得運行時對應指令速度(頻率)的相移角。該相移角加上得到。
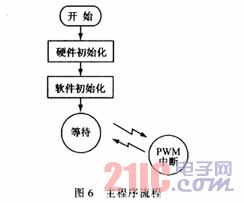
4 系統軟件流程
主程序流程如圖6所示,只完成系統硬件和軟件的初始化任務,然后處于等待狀態。完整的FOC控制算法在PWM中斷服務程序中實現。在一個中斷周期內,流程依照系統控制框圖圖2,從一路AD采樣電流,計算轉子位置角,計算轉速,完成所有反饋通道計算后,再調用正向通道中計算模塊函數,最后輸出三相逆變橋的空間矢量PWM波信號。