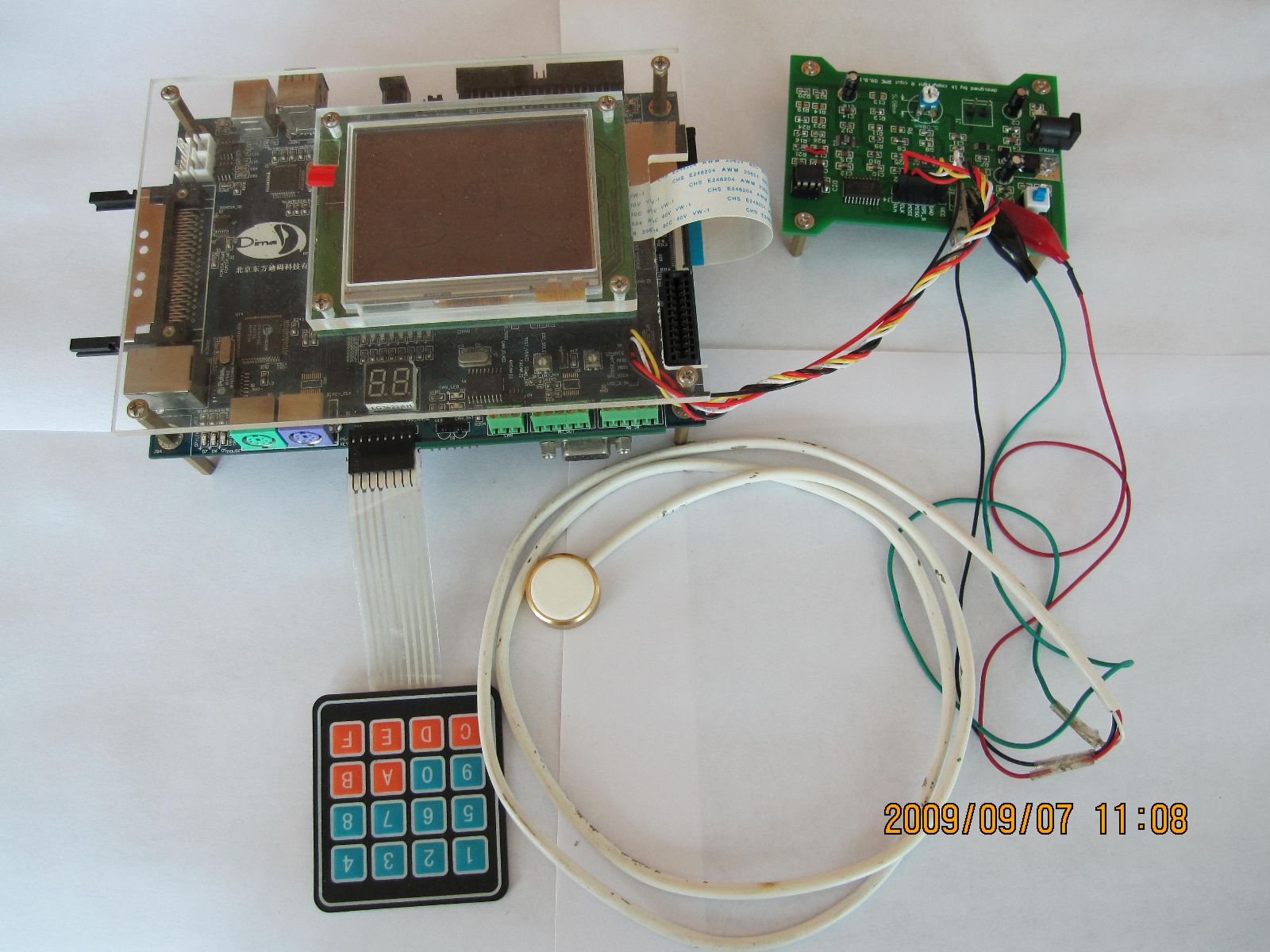
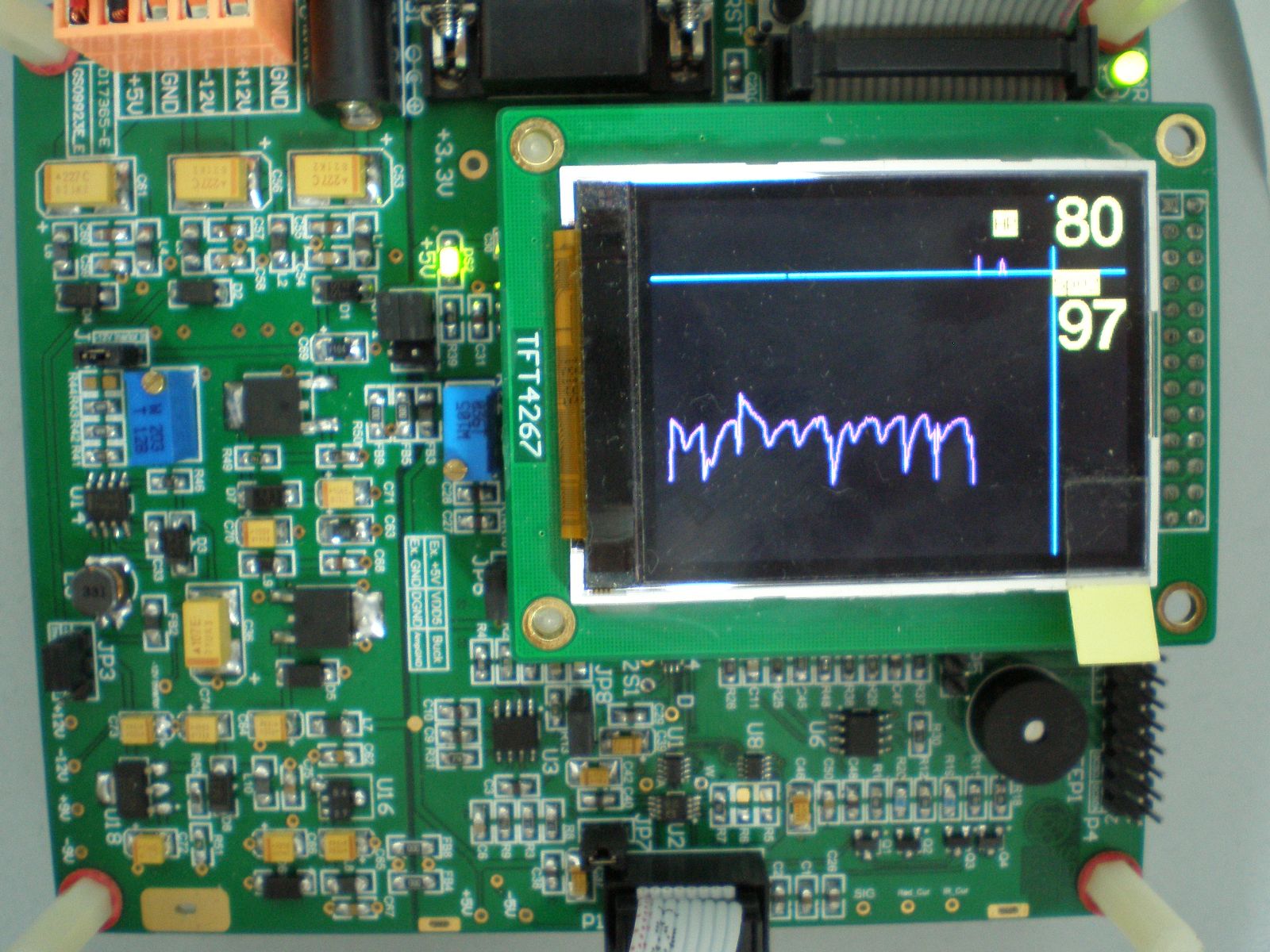
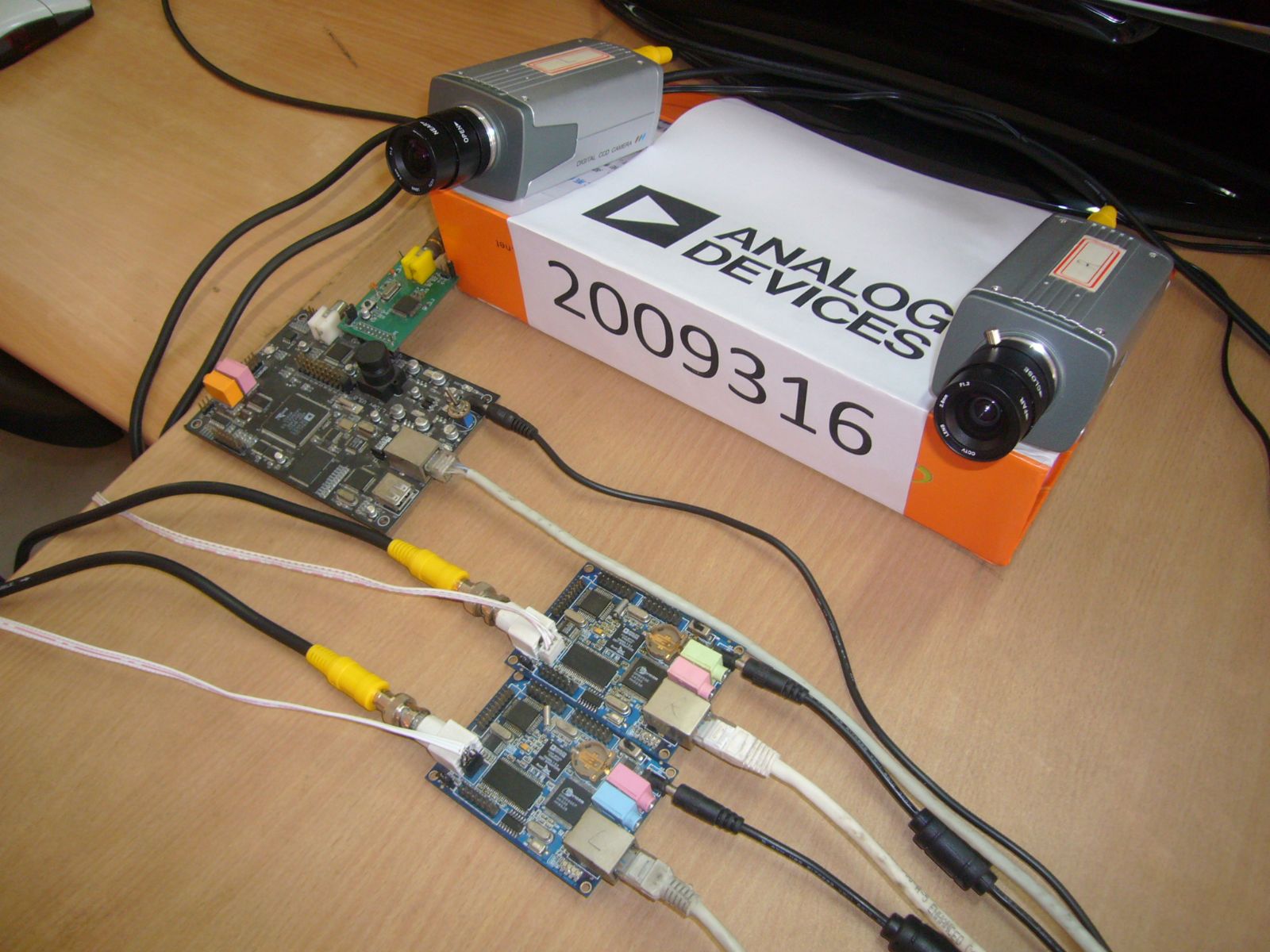
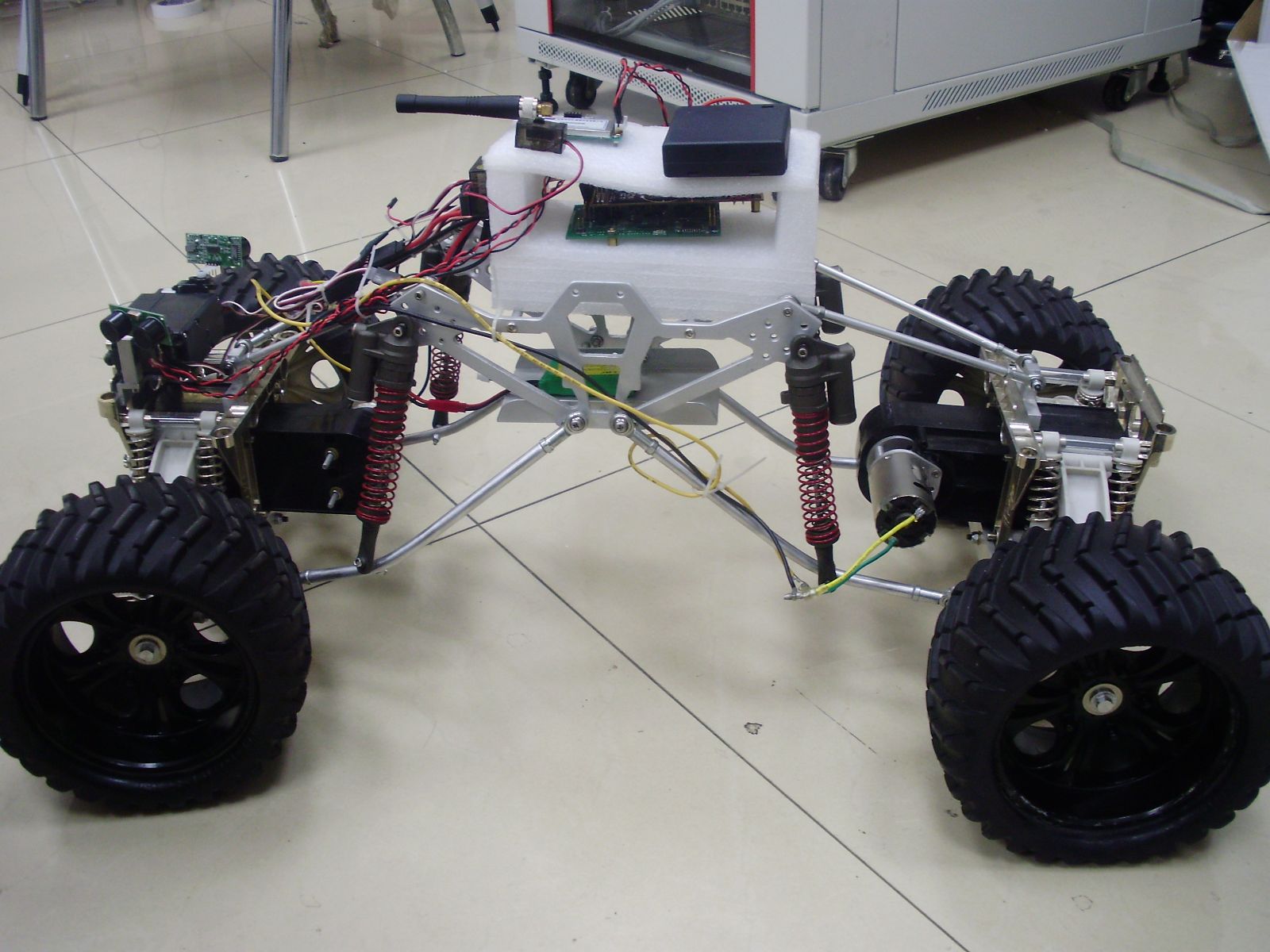
頭條 52年前中國第一顆人造地球衛星“東方紅一號”發射成功 52年前的今天,中國第一顆人造地球衛星“東方紅一號”發射成功,中國探索宇宙奧秘的序幕由此拉開。仰望星空,北斗環繞,嫦娥奔月,神舟飛天!我們從未停止探索浩瀚宇宙的腳步!今天中國航天日,#一人一句祝福中國航天#!致敬中國航天人! 最新視頻 【視頻】基于BF533的脈搏波測試儀 人體脈搏與疾病尤其是心血管類疾病之間的密切關系,本文采用ADI公司BF533開發平臺,通過間接測量法能夠實現人體脈搏的實時監測,并依靠533處理器強大的運算能力,實現了脈搏周期提取和識別,給出基于1024點的FFT頻譜分析以及人體脈搏特征評價的K值。系統能夠實現多模式數據存儲,上位機監控,數據回放等功能。具有處理速度快、功能齊全,工作穩定可靠等特點。 發表于:6/23/2011 【視頻】電磁輻射綜合分析儀 本設計采用BF533作為信號處理和控制的核心,通過對3個預置的天線接收的信號進行濾波、放大、混頻、中頻放大進行處理。得到環境中的相應頻譜信息。如果強度過大,就會預警。設計尤其針對900M、1800M、2.4G等常見頻段進行了一些預置,能夠幫助用戶直接對干擾源進行判斷,而不用去讀頻譜曲線,以便采取相應措施 發表于:6/23/2011 【視頻】無創血氧飽和度脈搏檢測儀 無創血氧飽和度脈搏檢測儀不僅安全有效、操作簡便,而且監測實時,廣泛用于臨床研究、診療監護等領域。本設計利用脫氧血紅蛋白(Hb)和氧合血紅蛋白(HbO2)對透射過人體組織的紅光(660nm)和紅外光(940nm)的不同吸收屬性測得血氧飽和度和脈搏。嵌入式系統不僅獨立完成了小信號調理采集,波形分析計算,結果顯示等工作,還可以通過串口連接計算機,利用計算機進一步分析數據,并在多臺計算機之間構建網絡,實現了同時遠程監測多個血氧檢測儀的目的。 發表于:6/23/2011 【視頻】基于ADSP-BF533教學型三自由度并聯數控雕刻機數控系統開發 本項目開發了基于ADSP-BF533教學型三自由度并聯數控雕刻機的數控系統。該系統以ADSP為核心處理器,構建“PC機+ADSP”的數控系統硬件平臺。上位PC機采用Visual C++開發軟件平臺,可識別G代碼和CorelDraw代碼;下位機ADSP采用C語言開發驅動軟件,實現對三個電機聯動控制;上下位機通過RS232實現實時通訊。通過聯機調試,實現了正確加工軌跡,驗證了本項目機構分析的正確性和數控系統的可行性。 發表于:6/23/2011 【視頻】基于皮膚肌電信號模式分類的仿生手系統 本項目以ADI模擬器件,ADSP-BF533處理器為主開發了基于皮膚肌電信號的仿生手系統。本系統通過鍍銀表貼電極采集皮膚肌電信號,經過工頻陷波、帶通濾波多級放大后,通過模/數轉換芯片將肌電信號數字化并送入到DSP中。采用小波包變換提取表面肌電(surface ElectroMyoGraphy,sEMG)信號特征向量,并以之為基準實現前臂的動作模式分類。根據判別結果產生相應的控制信號,驅動由AX-12+數字舵機構成的假肢作出相應的動作。 發表于:6/23/2011 【視頻】基于人眼定位的3D顯示器 本系統是一個基于人眼定位的3D顯示器,它能根據人眼位置的變化實時更新屏幕繪制,從而使人產生觀看真實3D物體的體驗。系統通過攝像頭拍攝人臉圖像,用人臉檢測的方法定位人眼,通過空間變換計算出人眼的3D位置,最后用中心投影繪制3D線框模型。人臉檢測方法采用基于Haar特征的Adaboost算法。我們利用有限的DSP資源穩定地實現了這個系統,并做了大量的算法改進以及基于平臺的優化,極大地提高了性能。 發表于:6/23/2011 【視頻】導盲眼鏡 本項目以ADSP-BF561為核心處理器,以uClinux為操作系統,通過基于數據分割的 雙核并行運算,實現兩路攝像頭圖像信息的高速處理,進而建立了導盲眼鏡平臺。本系統實 現了條形盲道、盲道警示磚、斑馬線和交通燈的實時檢測,并綜合計算出盲人行走所需的信 息,語音提示盲人找到盲道、在盲道上正確行走并轉向、在盲人遇到十字路口時,給出相應 提示,為盲人出行提供必要的安全保障,具有明顯的社會意義和可觀的市場價值。 發表于:6/23/2011 【視頻】基于結構光雙目視覺的智能機器人系統 本系統基于ADSP-BF548處理器設計并實現了具有結構光雙目視覺的四足可變形仿生機器人系統。本系統配置了兩路攝像頭、3路iMEMS傳感器和電子羅盤的信息采集接口,并實現對機器人平臺狀態和行為控制。本系統基于DSP處理器實現了結構光雙目視覺實時信息采集與處理,具備自身姿態和方位感知能力,能夠實現較高精度的環境測量和自適應控制。 發表于:6/23/2011 【視頻】德州儀器:TMS320DM365 數字媒體處理器示例 TMS320DM365 數字媒體處理器示例 發表于:6/22/2011 【視頻】汽車自動入庫系統的設計展示 本項目設計一種基于超聲波掃描測距和磁強計加速度計姿態測量的嵌入式自動倒車入位系統。在車輛上安裝超聲波掃描測距裝置,通過掃描多點測量,獲取車位位置尺寸信息,車載磁強計加速度計組成車輛的導航系統,獲取車輛的位置航向信息。該設計基于對理想泊車路徑的規劃,通過BF537數字信號處理器作為主控單元對車輛的運動進行控制,實現了在垂直泊車環境下的安全泊車任務。但由于時間的限制,本次設計沒有完成平行泊車環境的泊車任務,有待在今后的研究中解決。 發表于:6/21/2011 ?…70717273747576777879…?