
E380 是四方電氣于2007年年初推出的集成型變頻器,在E350系列的基礎上,改進了硬件和軟件設計,集成了多種專用功能,針對拉絲行業,E380改進了 PID設計,通過主機的前饋PID設計,達到張力的平衡,為實現主機和卷繞的穩定同步,E380通過RS485通信功能聯動,實現加工產品的高性能。
一、系統控制簡圖

二、外部元器件功能說明:
R1 主機頻率設定電位計
R2 從機制動電阻
R3 張力桿高精度電位計
S1 主機點動腳踏開關
S2 主機啟動自鎖按鈕
S3 主機,從機復位非自鎖按鈕
S4 外部急停機械自鎖按鈕
S5 擺桿位置檢測接近開關
MC1 抱閘控制輸出繼電器
MC2 排線啟動控制輸出繼電器
三、功能描述和實現方法:
1:主機點動獨立控制。
主機在牽引線過程中,需要單獨控制主機牽引拉伸穿線,此時不能啟動卷繞機。
實現方法:通過多功能端子X1實現主機點動,點動頻率不同步。
主機參數設置:F3.0=6,F9.3=x1x1。
參數說明:選擇外部多功能端子為正轉點動控制,主機點動不同步輸出。
2:卷繞機的啟動控制。
通過RS485通訊,使卷繞機在主機運行到一定頻率后開始執行卷繞操作。與很多變頻器不同的是,從機不需要給出單獨的啟動控制指令,而是由主機通過RS485通訊控制,只需要設定從機的起始頻率即可。
卷繞機參數設置:F8.1=2
參數說明:主機設定頻率高于2HZ時,從機開始啟動運行。
3:主從頻率聯動。
主機與從機的頻率存在一定的對應關系,四方變頻器可以自適應地尋找主從頻率對應比,但合理的設置主從聯動比例和機械傳動比,可以使拉絲機較快進入穩定狀態。
主機參數設定:F9.0=0014,F9.3=1111,F9.5=1.0。
從機參數設定:F9.0=0014,F0.1=2。
參數說明:主機和卷繞的通訊功能配置均相同,主機設置點動頻率不輸出,則主機點動時不同時起動從機,輸出頻率為同步頻率源。聯動輸出比例設置為0.7。
注意事項:主機必須以輸出頻率做為同步頻率源,不能以設定頻率作為頻率源,否則容易出現不穩定現象。
4:主機速度頻率給定。
主拉變頻器的速度,決定了整個拉絲機系統的工作效率,為方便現場操作,主機變頻器頻率輸出一般通過外接電位計來實現。
主機參數設定:F0.1=5,F0.8=80,F2.2=0,F2.3=10,F2.8=0,F2.9=80,F0.10=50,F0.11=50。
參數說明:主機通過外接電位計調節速度。主機加減速時間設定為50S。
注意事項:
本系統為保證效率,主機的上限頻率一般設置到80Hz,主機的加減速時間不宜過短,一般設定在40S-100S。
5:排線機啟動控制
卷繞機啟動后,為使卷繞銅絲均勻,需啟動排線機,排線機的啟動使用卷繞變頻器的集電極端子OC1輸出。
卷繞機參數設定:F3.6=2,F3.10=2,F3.11=0.1。
參數說明:OC1輸出選擇FDT電平輸出信號,FDT頻率設定為2Hz。即當從機變頻器輸出頻率大于2Hz時,啟動排線機設備。
6:卷繞機的張力反饋。
張力桿的穩定度是衡量產品質量的標準,如果張力桿不穩定,產品的線徑不夠均勻。系統通過張力反饋信號來實現卷繞機頻率的調節而實現張力恒定,伸線機的張力反饋器為高精度電位計,通過變頻器的5V電平輸出供應電源,反饋輸入接入VC1。
從機參數設定:F0.0=0001,F2.0=0,F2.1=5,F7.0=0,F7.1=0021,F8.11=50。
參數說明:從機使用為拉絲模式,PID的反饋通道選擇為VC1。選擇PID功能有效。
注意事項:
為方便調試,卷繞機的張力反饋調節需要調節張力桿電位計的位置,通過監控D-9參數微調,使張力桿在平衡位置時達到中心點50。
7:線速度檢測功能,計米功能實現。
卷繞機的線速度檢測一般通過導輪的接近開關實現,通過檢測接近開關的頻率,可以實現卷繞機線速度的檢測,從而實現計米功能和自動計長功能。
卷繞機參數設定:F8.8=4,F2.6=0,F2.7=0.2。
參數說明:線速度輸入源使用PLS脈沖輸入信號,考慮到最高線速度,設置最高脈沖輸入頻率為200Hz。
注意事項:
卷繞機的線速度是對應的最大線速度需要根據導輪的半徑具體計算。當導輪轉動一圈,接近開關輸出一個脈沖時的計算方法如下:F8.9=2*(3.14)*R*(F2.7)*1000
其中R為導輪的半徑,單位為m,F8.9的單位為m/S。
8:斷線故障檢測以及抱閘信號輸出。
根據接近開關信號輸入檢測是否短線,為了防止誤檢測,從機需要正確設定下列參數。
參數設定:F8.12=1,F8.13=10,F8.14=20%,F8.15=2,F8.16=1,F8.18=7,F8.20=7S,F3.7=21。
參數說明:變頻器斷線檢測功能在從機高于10Hz,延時2秒以后,且擺桿位置低于20%時間1秒以上有效。當卷繞機檢測到斷線故障時,需要及時輸出抱閘信號到機械系統,實現緊急停車,此時變頻器自由停車,使用OC2信號輸出功能。
9:卷繞機停機參數設定:
卷繞機在停機過程中,當頻率較低時候,反饋系統容易不穩定,為了保證停機時避免較大的張力桿擺幅而造成斷線,一般對卷繞部分直流制動停機。
參數設定:F8.19=1.5Hz,F8.20=7。
參數說明:停機方式選擇減速停機,起始頻率設置為1.5Hz剎車信號起始頻率為1.5Hz,剎車時間為7S。
10:平滑啟動功能:
卷繞機在啟動時,由于預先給定了前饋頻率,從而容易造成啟動沖擊而使張力桿不穩定,四方E380拉絲專用變頻器優化了啟動過程的算法,通過參數F8.0合適的設置,可以達到平穩啟動,起停基本不斷線的功能。
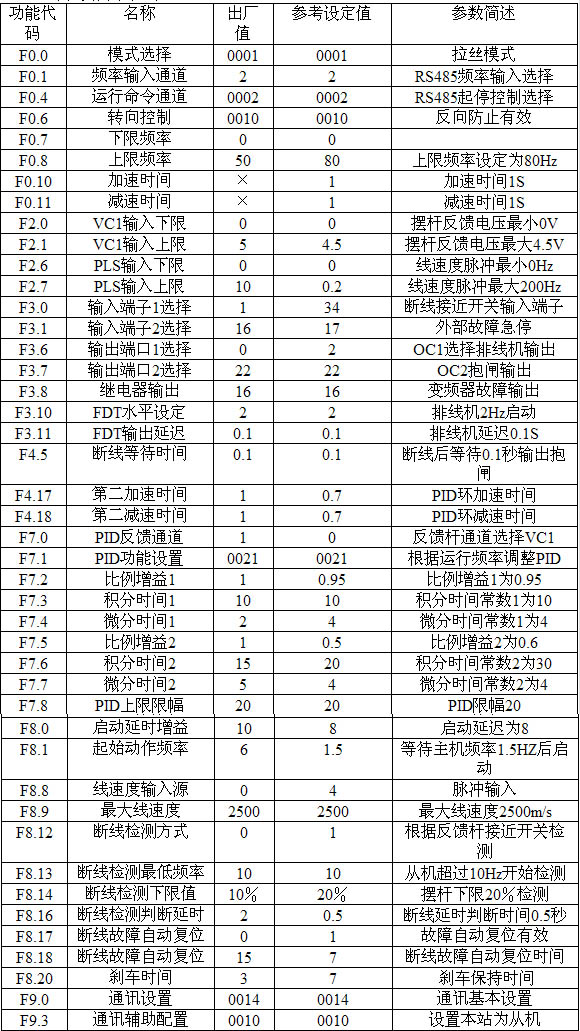
四、參考參數表:
四方變頻器主機參考參數設置表:

四方變頻器從機對應參數表:
從機參數參考表及簡單說明:
五、調試注意事項說明:
1、擺桿反饋位置調試:
四方變頻器啟動過程不需要人為參與,因此,必須保證幾個先決條件:
(1)、啟動初始時,擺桿位置反饋值處于最小。(2)、啟動過程完成后,擺桿的平衡穩定點處于反饋中間位置。可以通過監測參數D-9,調節參數F2.2,F2.3實現(即保證擺桿最低位置D-9=0,擺桿最高位置D-9=100,擺桿平衡位置D-9=50)。
2、啟動停機過程調試:
四方變頻器使用獨特的啟動算法,最大限度保持卷繞機擺桿啟動過程的平穩,實現啟停不斷線。影響起停的關鍵的參數有:
(1)、主機的加減速時間。主機加減速時間越長,啟停穩定度越高,一般推薦使用50S以上。
(2)、從機的加減速時間。從機加減速時間有加減速時間1,加減速時間4,其中加減速時間1為變頻器的輸出頻率加減速,加減速時間4為前饋PID 的PID環輸出加減速時間。為了保證變頻器啟動停機以及平穩運行時的快速響應,在保證變頻器無故障輸出時,應該盡量減少此兩個加減速時間。
(3)啟動平滑時間。平滑時間是指啟動過程中擺桿被拉起的時間,時間越長,擺桿啟動平穩度越好,時間越短,擺桿啟動越快,需要折中選擇。
(4)聯動設定比。四方變頻器具有自動識別聯動比例功能,在第一次使用時,如果沒有正確設置聯動比例,則可能出現啟停不穩定的情況。可以通過人為調節正確的聯動比例實現啟動停機穩定,也可以通過第一次啟動,使變頻器自動識別,在第二次及以后的啟動過程,均可以保證變頻器正常啟停。
3、擺桿平穩度調試:
擺桿的平穩度是檢驗變頻器性能的標準,四方變頻器使用的是前饋PID功能算法,最大限度保證了擺桿平穩運行。四方變頻器可以選擇單一參數組,也可以選擇根據運行頻率實際自動調節PID參數組。以下論述PID參數組基本調試方法:
(1)、比例增益。比例增益影響PID環節的快速響應。當擺桿在啟停或者穩定運行時出現較大超調時,可適當增加此參數值。
(2)、積分時間。積分時間常數使保證PID環節穩定的關鍵參數,增加積分時間,可以減少在穩定運行時的擺桿振幅。過大的積分時間常數容易形成擺桿的大幅超調。
(3)、微分時間。微分時間常數可使PID環節做出預先判斷,抑制擺桿超調,但是此參數值設置過大,容易出現振蕩。
六、調試過程問題解決:
調試過程中容易出現問題如下:
1、啟動斷線:
如是第一次上電啟動出現斷線,可能是機械傳動比或者主機和從機頻率比例設置不夠合理,導致變頻器軟件誤判正確的機械或主從頻率比,此種狀況在第二次試機時可消除,四方專用模塊可在第一次啟動過程中正確檢測合理傳動比。
如非第一次啟動斷線,擺桿被拉升到高位斷線,此種情況可能由于主機的加減時間過短,此時適當增加主機的加減速時間。一般推介主機加減速時間大于50S。
2、啟動過程加速:
四方電氣在啟動過程中使用了獨特的算法,從機啟動必須在主機啟動后,不能同時啟動,否則容易出現擺桿的不穩定。在從機開始啟動后必須快速爬升到擺桿的啟動頻率,因此此過程時間在3S左右,可以降低起始動作頻率減少此過程。同時啟動增益延時可以減少。
3、啟動過程擺桿振幅比較大:
啟動振幅大,與幾個因素有關,第一是主機加減速時間,當此時間過短,導致主機的輸入頻率變換過快,而使從機頻率跟蹤速度不穩定,而可能導致擺桿穩定度不夠。第二與啟動增益有關,延長啟動增益時間,可以提高擺桿穩定度。
4、手動擺桿到目標位置,從機啟動過慢:
很多客戶原來使用其他品牌變頻器或者PID控制板,由于啟動過程不夠穩定,習慣將擺桿預先放置在目標位置,但是如使用四方收卷變頻器發現如果預先給定擺桿位置,此時從機啟動速度太慢。四方變頻器的啟動算法較為獨特,不需要啟動過程的人為參與,因每次啟動過程都是參數的自校正過程,人為參與會導致參數的自校正錯誤,而使變頻器的啟動速度過慢。
5、擺桿在拉絲過程中,出現振幅較大,或者出現振蕩斷線情況:
四方PID算法能夠保證擺桿的穩定度,但是如果隨頻率的變化,導致PID參數不夠適用當前運行頻率時,可能會出現這種狀態。此時有兩個解決辦法,第一是PID參數的設置根據運行頻率,當高頻時使用第一組參數,低頻時使用第二組參數,具體參數可以參考從機參數表。第二是適當降低當前PID控制器的微分參數。微分參數在保證擺桿穩定度時,也增加了系統的不穩定性,適當減少此參數,可大大增加系統的穩定度。
七、拉絲專用監控參數及說明:
d-0: 變頻器輸出頻率
d-6: 前饋疊加頻率
d-8: 擺桿位置設定值
d-9: 擺桿位置反饋值
d-10: 從機運行線速度
d-11: 累計卷繞線長
d-20: 卷徑當前值
d-21: PID環輸出頻率
d-22: 自適應同步增益