
引言
隨著電子技術的發展,汽車電子化程度不斷提高。安全、便捷、舒適、無污染、經濟性一直是汽車工業和用戶追求的目標。實現這些目標的關鍵在于汽車的電子化和智能化,先決條件則是各種信息的及時獲取。
汽車在行駛過程中的各種路況信息是非常復雜的。在行駛過程中可作為剛性特征體來考慮,將三軸加速度計放在被測車體的某個特征點上,就可準確地采集到該特征點運動過程中在x軸,y軸,z軸的三個加速度分量。結合車體總質量可以計算出車輛的瞬時受力情況;結合車輛即時速度,可以計算出瞬時功率。采集和計算出的運動參數等信息可以進行本地的控制處理。同時,本系統支持CAN總線接口,利用該接口,可以將得到的數據發送到汽車計算機控制系統進行綜合分析處理。從而使本系統可以廣泛應用于汽車自動變速器,汽車安全氣囊(Airbag)、ABS防抱死剎車系統、電子穩定程序(ESP)、電控懸掛系統等方面。
1 方案總體設計
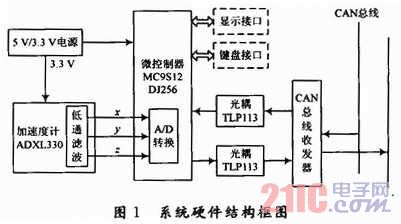
該采集平臺需要解決數據采集、計算及通信的問題,而且由于應用環境的復雜性,需要保證系統的抗干擾性及可靠性。系統硬件結構框圖如圖1所示。主控制器通過ADXL330采集三個坐標軸上的加速度分量,經過分析計算后提供給本系統直接應用或通過CAN總線提供給別的應用者。
2 建立汽車運動模型
汽車在路面上的運行環境是非常復雜的,受到的振動頻率分布很寬,一般情況下車輛的振動頻率范圍可分為如下幾種情況:
剛體運動:0~15 Hz;
結構振動,板件共振:15~150 Hz;
噪聲及嘯鳴:150 Hz以上。
汽車典型的共振頻率范圍通常為:
車身共振頻率:1~1.5 Hz;
車輪跳動:10~12 Hz;
座椅上的乘客:4~6 Hz;
懸置的動力總成:10~20 Hz;
結構共振頻率:大于20 Hz;
輪胎共振頻率:30~50 Hz和80~100 Hz。
在研究車輛的運動時,主要研究的對象一般包括車輛的運動速度、運動位移、瞬時加速度、瞬時功率、瞬時驅動力等。而以上各項參數,均可通過對被測點的加速度計算得出。車體在空間位置的加速度如圖2所示。

車輛瞬時驅動力F=ma。其中,F為車輛的瞬時驅動力;m為車體總質量;a為運動加速度。
速度![]() 。其中,v為運動速度;v0為初始速度;
。其中,v為運動速度;v0為初始速度;![]() 為加速度對時間的積分。
為加速度對時間的積分。
瞬時功率P=Fv。
ADXL330是一個三軸(x軸,y軸和z軸)模擬輸出的加速度傳感器,通過ADXL330能夠測量出任意時刻三個方向的加速度分量。通過測量得到的加速度分量可以計算出車輛的運行狀態,動力學參數等信息。
3 硬件設計
3.1 電源設計
汽車的用電設備所需電能有兩個來源:發電機和蓄電池,輸出的額定電壓為12 V。本設計中采用LM2575開關穩壓器和LM1117低壓差線性穩壓器將12 V輸入電壓轉換為5 V和3.3 V的供電電源。電源設計原理圖如圖3所示。
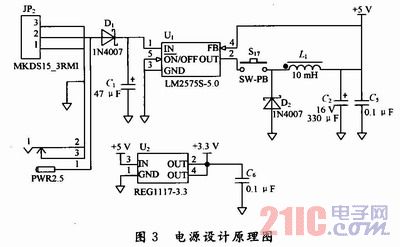
LM2575是美國國家半導體公司生產的1 A集成穩壓電路,電壓輸入范圍寬為7~40 V,電流輸出最大可達1 A;同時內部有完善的保護電路,包括電流限制及熱關斷電路等。
LM1117為低壓差線性穩壓器,其壓差典型值僅為1.2 V,輸出電壓精度高達±1%。輸出的3.3 V電源提供給主控制器使用,為保證電源系統的穩定性,輸出端需要添加一個10μF的鉭電容來改善瞬態響應和穩定性。
3.2 主控制器電路設計
系統主控制器采用MC9S12DJ256單片機,它是Freescale公司基于16位HCS12內核制造的高速、高性能、低功耗的芯片。它使用了鎖相環技術和內部倍頻技術,使內部總線速度大大高于時鐘產生器的頻率,在同樣速度下所使用的時鐘頻率較同類單片機低很多,因而高頻噪聲低,抗干擾能力強,更適合于汽車內部惡劣的環境。
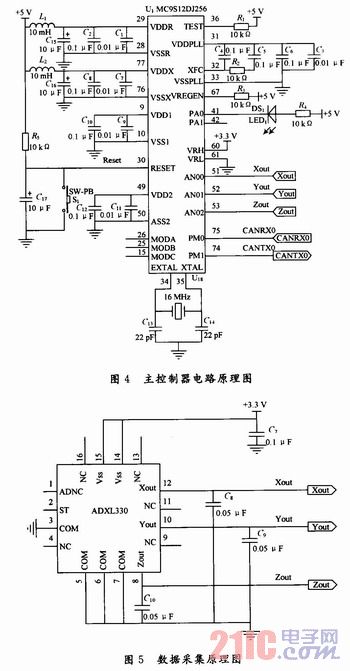
MC9S12DJ256單片機的主頻高達25 MHz,同時片上還集成了許多標準模塊,包括2個異步串行通信口SCI、3個同步串行通信口SPI、8通道輸入捕捉/輸出比較定時器、2個10位8通道A/D轉換模塊、1個8通道脈寬調制模塊、兼容CAN 2.0A/B協議的2個CAN模塊以及一個內部I2C總線模塊;片內擁有256 KB的FLASH E2PROM,12 KB的RAM及4 KB的E2PROM,資源十分豐富,可滿足本方案設計要求。主控制器電路如圖4所示。
3.3 數據采集電路設計
ADXL330支持對輸出進行低通濾波。可以通過調整輸出引腳接地電容的大小來設置。輸出帶寬主要是由RFILT,Cxyz的大小決定的。-3dB的帶寬計算公式如下:
可簡化為:
![]()
電阻RFILT的標稱值為32 kΩ,位于芯片內部,偏差在±15%。Cxyz的最小值不能小于0.004 7μF。
由于汽車在路面上的的振動頻率一般在1~100 Hz的范圍內,則可選取濾波電容Cxyz的值為0.05μF,從而實現帶寬為100 Hz的低通濾波。電路如圖5所示。為了濾除供電電源產生的噪聲,需要在加速度計的電源Vs和Com之間接一只0.1μF的電容。
3.4 CAN總線傳輸電路設計
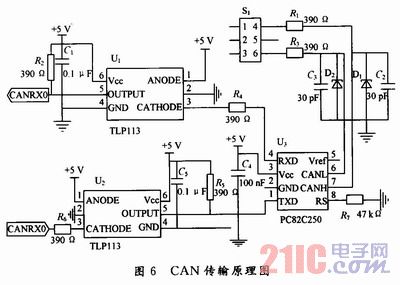
PCA82C250是CAN協議控制器和物理總線間的接口,可以提供對總線的差動發送和接收能力,與ISO11898標準完全兼容,并具有抗汽車環境下的瞬間干擾、保護總線的能力。它主要是為汽車中高速通信(高達1 Mb/s)應用而設計。為了增強CAN總線節點的抗干擾能力,MC9S12DJ-256的CANTX0和CAN-RX0并不直接和收發器PCA82C250的TXD和RXD相連,而是通過高速光耦TLP113隔離后再和PCA82C250相連,這樣就可以實現各CAN節點間的電氣隔離,提高系統的穩定性和安全性。其電路原理如圖6所示。
4 軟件設計
ADXL330的輸出為模擬電壓信號,可直接進行A/D采樣。當電源電壓發生變化時,輸出的相關參數也會變化,本文電源電壓為3.3 V,比率因子電壓加速度比為330mV/g,加速度為0時的輸出電壓約為0.5Vs(Vs為電源電壓)。所以,將x軸輸出信號Xout,換算成對應加速度ax為:

由于傳感器在使用中會存在隨機干擾,這些干擾會影響測量精度。本文采用簡單的平均值濾波法降低干擾對系統的影響,取最近5次采樣的平均值為最終采樣值,采樣流程圖如圖7所示。

報文的收發由CAN控制器根據CAN協議規范自動完成。由于MC9S12DJ256的CAN控制器擁有3級緩沖,所以可以發送多組數據完成實時操作。需要發送數據時,CPU根據TXEx位來確定可用的緩沖區,然后將報文寫入發送緩沖區,并置位控制寄存器中的發送標志;由CAN控制器自動完成發送。CPU收到報文時會觸發中斷,在中斷處理函數中將接收到的報文寫入接收隊列。CAN收發流程如圖8所示。
5 結語
本文設計了一種基于加速度計ADXL330的汽車動力學參數采集平臺,介紹了其軟硬件結構。通過該系統,實現了與汽車運行相關的動力學數據的采集和計算。同時,采用高性能的控制器芯片使系統功耗低,計算性能高,運行穩定可靠。對系統進行較少的改動就能很好地應用于汽車自動變速器、汽車安全氣囊(Air-bag)、ABS防抱死剎車系統、電子穩定程序(ESP)等方面,具有很強的技術適用性和開發前景。