
摘 要: 介紹了室內定位系統" title="室內定位系統">室內定位系統的概念,比較了幾種典型的室內定位系統原理與相關算法,論述了超寬帶" title="超寬帶">超寬帶室內定位系統的基本原理、系統組成和實現方法,分析了其特點和優點,展望了該技術的發展方向和應用前景。
關鍵詞: 室內定位 智能空間 超寬帶
近年來,隨著近距離無線電技術的高速發展和無線局域網技術的進步,使得室內定位技術突飛猛進。在開闊的室外環境中,全球定位系統GPS提供了非常精確的定位信息,與此同時,人們對室內定位信息的需求也與日俱增,機場、展廳、寫字樓、倉庫、地下停車場、監獄、軍事訓練基地等都需要使用準確的室內定位信息,對可用空間和庫存物資實現高效的管理。超寬帶技術" title="超寬帶技術">超寬帶技術作為近年來新興發展起來的一種無線電技術,因其特有的性能,能夠提供精確的室內位置信息,非常適用于室內定位系統的應用[1]。美國、加拿大、日本等發達國家近年投入了大量的人力、物力對相關技術和產品進行研究和開發。我國正處于信息產業發展的關鍵時期,應該抓住機遇,爭取在室內定位系統這個有著極大現實意義和廣闊應用前景的領域有所突破。
1室內定位系統
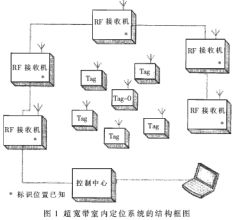
典型的室內定位系統大致包括標識、接收機、控制中心等主要部分。標識帶有發射電路,附在需要定位的個人或物體上,配置惟一的標識碼,發射信號給接收機。接收機安裝在建筑物的四周或天花板上,多個接收機相互連接,組成網絡。控制中心處理各個接收機得到的數據,通過信號處理、數據融合對標識進行定位,其跟蹤系統可以利用標識不同時刻傳回的定位信息繪制運動軌跡,推測其未來的運動趨勢,還可根據標識所在的區域,查詢已知的資源分布圖,幫助用戶找到所需的設備。
目前,有多種無線技術可以進行室內定位,包括室內GPS、RFID、IR、WLAN、Bluetooth以及UWB,它們都是利用定位網絡,通過接收到的信號參數,根據特定的算法對個人或者物體在某一時刻所處的位置進行測量。在應用精度上大致可以分為兩類,一類是目標發現(Finding Applications),它不需要獲得非常精確的位置坐標或者物體的特性,僅需要知道被定位目標的有無或者所在的區域;另一類是“智能空間”應用(Smart Space),它可以提供非常高的定位精度并能實時監控[2]。本文將從現有的室內定位算法和技術兩方面進行介紹。
1.1 室內定位算法
室內定位算法目前基本上是從室外定位算法中借鑒而來,最典型的有臨近檢測(PD)、信號強度分析法(RSSI)、到達時間定位(TOA)、到達時間差定位(TDOA)以及到達時間定位(AOA)[3]。
·臨近檢測(Proximity Detection)。臨近檢測依靠密集的天線陣列,每個天線的位置已知,根據接收到信號最強的天線區域判定其位置。這種算法的精度與天線的密度有關,普遍僅能達到米級精度,而且天線位置須是等間隔的。
·信號強度分析法(Received Signal Strength)。利用接收信號的強度與發射機和接收機之間距離的關系,建立信號的傳播模型對目標進行定位。由于這種算法對信道傳輸模型的依賴性非常強,多徑效應、墻壁的遮擋以及環境條件的變化都會使其精度嚴重惡化。
·到達時間定位(Time Of Arrival)。標識發射信號到達3個以上的接收機,通過測量到達不同接收機所用的時間(須保證時間同步),可以計算出標識與接收機之間的距離,然后以接收機為圓心、標識與接收機之間的距離為半徑做圓,3個圓的交點即為移動終端所在的位置。
·到達時間差定位(Time Difference Of Arrival)。這種定位算法與TOA類似,只是所測量為時間差而非絕對時間,利用雙曲線交叉進行定位。由于,不必滿足嚴格時間同步的要求,使得系統相對簡化,所以TDOA算法在定位系統中大量被應用。
·到達角度定位(Angle Of Arrival)。這種定位方法通過測量標識到兩個接收機的信號到達角度來定位,其定位精度與TOA和TDOA算法相比有一定差距,并需配置智能天線或其他復雜天線系統,因此在室內多徑環境下到達角度定位的方法一般只作為輔助手段。
1.2 室內定位系統
從信號形式上看,紅外、超聲波和射頻無線電是傳統室內定位系統主要的三種形式,下面從頻率范圍、作用距離以及標識和天線大小、造價幾方面分別進行介紹。
·RFID[4] 。此系統基于信號強度分析法,采用聚合算法對三維空間進行定位,通過標識檢測到的信號強弱來表示標識之間的距離,主要用于門禁系統,包括主動RFID和被動RFID。優點是標識的體積比較小,造價比較低,但是作用距離近,不具有通信能力,而且不便整合到其他的系統之中。采用該技術的代表有Spoton、Wavetrend和Bewator Cotag等公司。
·紅外線室內定位系統。IR標識通過發射調制的紅外射線,通過安裝在室內的光學傳感器接收進行定位。雖然紅外線具有相對較高的室內定位精度,但是由于光線不能穿過障礙物,使得紅外射線僅能視距傳播。當標識放在口袋里或者有墻壁及其他遮擋時就不能正常工作,因此需要在每個房間、走廊安裝接收天線,造價較高。目前Olivetti研究實驗室的Active Badge系統采用該項技術。
·超聲波室內定位系統[5]。超聲波定位主要采用反射式測距法,通過三角定位等算法確定物體的位置。雖然整體的定位精度較高,但是需要大量的底層硬件設備,因此存在成本較高的缺點。目前Cricket System和Active Bat采用該技術。
·藍牙室內定位系統。藍牙技術用于室內定位時,采用經驗測試與信號傳播模型相結合的方式,通過測量信號強度進行定位。其最大的優點是設備體積小、易于集成在PDA、PC以及手機中,因此很容易推廣普及。理論上,對于持有集成了藍牙功能移動終端設備的用戶,只要設備的藍牙功能開啟,藍牙室內定位系統就能夠對其進行位置判斷。目前藍牙室內定位系統的主要不足在于藍牙器件和設備的價格比較昂貴,而且對于復雜的空間環境,藍牙系統的穩定性稍差。目前美國的Tadlys等公司正在應用該技術進行相關產品的研發。
通過分析可以看出,以上幾種室內定位系統各有利弊。雖然目前大多數室內定位系統都能夠滿足目標定位的簡單需求,但是要達到室內“智能空間”的要求,還有一定差距。超寬帶信號與傳統無線電信號有著根本區別,這種新的信號形式,憑借自身的特性,應用在室內定位系統中,能夠使系統在標識大小、功耗、造價、精度、實時性、通信能力以及可擴充性能等方面得到大幅度提升,滿足人們對室內定位的新要求。
2 超寬帶技術[6]
超寬帶(UWB ULTRA WIDEBAND)技術是一項嶄新的無線電技術,最早應用在軍事上,由于其突出的性能優勢也非常適合于民用的各領域,因此近年來各國對UWB技術格外重視。
超寬帶技術是基于極窄脈沖的無線電技術。超寬帶探測與傳統的探測系統相比較,無論是工作機理還是技術實現都有極大的區別。當無線電探測系統的相對帶寬(信號帶寬與中心頻率的比值)大于20%時就稱之為超寬帶探測系統。即要滿足![]() 。式中的fh為頻率高端-10dB下降頻點位置,fl為低端-10dB下降頻點。
。式中的fh為頻率高端-10dB下降頻點位置,fl為低端-10dB下降頻點。
實際上,超寬帶系統是產生、發射、接收、處理極窄脈沖信號的無線電系統。超寬帶系統中發射的脈沖一般是脈寬小于1ns的高斯脈沖,這種窄脈沖具有非常寬的頻譜。隨著相關電子技術的發展,寬度在0.2ns以下的窄脈沖產生器已經研究成功,這種窄脈沖的相對帶寬接近甚至大于200%。與傳統的無線電探測系統相比較,在超寬帶探測系統中不需要載頻,能夠直接用產生的窄脈沖去激勵天線、輻射電磁波來進行目標的探測。
3 超寬帶室內定位系統
圖1所示為超寬帶室內定位系統的結構框圖。該系統包括被動UWB接收機、UWB參考標識以及若干主動UWB標識[7]。
圖2為超寬帶室內定位系統的信號處理框圖[8]。標識的時鐘從存儲器中讀出偽隨機時間間隔" title="時間間隔">時間間隔調制編碼信息,以控制調制電路多脈沖間隔的變換。經過調制后的時序激勵窄脈沖產生電路,產生初級窄脈沖。為了提高探測距離,需要使用脈沖放大電路對脈沖進行放大,提高脈沖幅度后再通過天線向室內空間輻射。每個UWB接收機在系統時鐘的控制下接收標識發射的UWB信號。由于在電磁波輻射過程中,必然混雜進各種噪聲及干擾信號,因此還必須對這些無用信號進行過濾。經過這些步驟后即得到含有效信息的信號。脈沖的寬度極窄,為了準確地對接收到的信號進行采集,必須對信號進行等效采樣。采樣后的信號經篩選,提取出有效信息,最后通過中央處理單元的定位算法得到標識的精確位置信息。
?

3.1 超寬帶室內定位系統的特點
3.1.1 高分辨率
探測設備對目標的識別能力取決于其距離分辨率和角度分辨率(方位角和仰角),而距離分辨率又正比于發射脈沖的時域有效寬度。超寬帶室內定位系統因其亞納秒級極窄脈沖的時間寬度,因此它的距離分辨率極高,可以達到厘米量級。利用這個特性,可以獲得更多的室內距離信息。
3.1.2 頻譜的有效利用
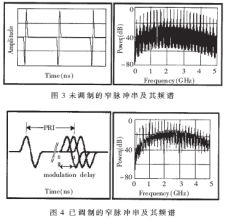
超寬帶室內定位系統在探測過程中發射的是窄脈沖串" title="脈沖串">脈沖串,但脈沖間的時間間隔不是固定不變的,而是按照特定規律進行偽隨機跳變。一般情況下,相互間間隔按照偽隨機規律改變后的發射脈沖信號可用公式(1)表示:

其中,Tf為脈沖重復幀時間;Tc為時隙(time-hopping)時間;Cj為偽隨機時隙編碼。
將上述變化過程看作窄脈沖串的時間間隔調制。在調制前,對于單個窄脈沖,把很小的功率分配在極寬的頻譜范圍內,窄脈沖串的功率譜密度達到非常小的量級。脈沖間隔被偽隨機調制后,脈沖串的頻譜更顯示出類似噪聲的特性。圖3是沒有經過時間間隔調制的脈沖串的譜線,圖4是已經進行了偽隨機時間間隔調制后脈沖串的頻譜。從兩圖對比可以清晰地看出脈沖串在時間間隔調制前和調制后的頻譜變化。類似噪聲的特性使得脈沖串功率譜密度繼續被平滑。
傳統的無線電室內定位系統中所有信息來自特定頻率的電磁波,在無線電設備密集的環境中,相互之間距離很近,分配到相同頻點的標識可能會接收到其他設備的同頻信號,從而出現系統紊亂或錯誤定位。所以定位系統必須為每個標識都分配專門的工作頻點,這種工作模式是對頻譜資源的一種浪費。對超寬帶系統而言,具有極低的信/擾比門限,平均發射功率很低,如工作范圍在幾十米以內,所需功率僅需幾十到幾百微瓦。由于功率譜密度極低,甚至低于環境噪聲以下,所以信號不會對其他系統產生不良的干擾,可以與之共享頻帶,實現共存,最大限度地利用稀缺的頻譜資源也是超寬帶技術可以沒有限制地被用在室內定位領域的一個很重要的原因。
3.1.3 多用戶共享
前面所述的偽隨機時間間隔調制表達式是對單個用戶而言;對于多用戶,超寬帶系統可以對不同的用戶分配不同的偽隨機編碼,根據不同編碼進行脈沖位置調制。類似于無線通信中的多址通信方式。這樣在相關接收端,每個用戶只能從回波信號中提取按照自身編碼調制過的發射信號,其他標識發射回波即使被天線接收也會自動濾除。因此標識能夠同時使用同種定位設備,可以互不干擾地共享無線資源。不同用戶發射的第k個窄脈沖信號如下式:
3.1.4 復雜環境工作[9]
在室內環境中,電磁空間環境非常復雜,再加上墻壁等障礙物,接收設備接收到的標識信號必然包含了各種干擾。試驗數據表明,復雜環境中多徑時延常為納秒級,當前的相對窄帶無線電系統無法對如此小的時延進行分辨。超寬帶系統采用納秒級的離散窄脈沖進行探測,經多徑反射的延時信號與直達信號在時間上可以分離, 能夠很好地分離出干擾信號,提取出有用信息,具有強抗多徑衰落能力。
除上述特點外,超寬帶室內定位系統還有很多其他優點,如無中頻電路、結構相對簡化、硬件易實現、功耗低等。
3.2 室內定位技術比較
表1通過評定等級的方式比較現有的幾種室內定位技術,用☆☆☆、☆☆、☆表示三個等級,分別為好、中、差。
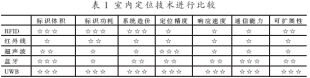
從表1可以看出,UWB室內定位技術憑借自身的特性,在系統小型化、成本、功耗、精確度等各個方面都具有顯著的優勢。如果超寬帶室內定位系統能夠在不違反FCC功率限制的前提下再提高一些作用距離、能夠進一步將天線以及整體系統小型化,那么超寬帶技術將是實現“智能空間”系統的最佳選擇。
將超寬帶無線電技術應用在室內定位系統中有很多益處,國外已有相關產品投入生產和使用。可以預計,未來的室內定位系統將更加小巧,更易于安裝,具有更高的分辨率、穩定性和可靠性,而且超寬帶定位系統的智能化也是必然趨勢。發展我國自己的超寬帶室內定位系統,能產生良好的經濟效益和廣泛的社會效益。
參考文獻
1 Kaveh Pahlavan,Xinrong Li,Juha-Pekka  . Indoor geolocation science and technology[J].IEEE Communications Magazine,2002;(2):112~118
. Indoor geolocation science and technology[J].IEEE Communications Magazine,2002;(2):112~118
2 Pete Steggles, Jay Cadman. A comparison of RF tag location products for Real-World applications a ubisense white paper [EB/OL].http://www.ubisense.net March 2004
3 Zeev Weissman. Indoor location white paper [EB/OL] http://www.tadlys.com 2004
4 孫 瑜,范平志.射頻識別技術及其在室內定位中的應用[J].計算機應用, 2005;25(5):1204~1208
5 關媛媛,安世全,劉光明.提供精確室內定位信息的Cricket系統[J].重慶工業高等專科學校學報,2004;19(2):39~41
6 李 熹,王治國,房秉毅.超寬帶車輛防撞系統的研究[C].2005年全國博士生學術論壇.2005.9
7 Robert J. F, Steven J. G. Ultra-Wideband precision asset location System[C]. Proceedings IEEE Conference on Ultra Wideband Systems and Technologies, May 2002
8 Sinan G, Zhi Tian,Georgios B. G, et al. Localization via Ultra-Wideband radios[A look at positioning aspects of future sensor networks][J].IEEE Communications Magazine,2002;(2):70~84
9 Hyonmin K, Youngmi K, Taekyung S et al. Comparisons of TDOA triangulation solutions for indoor positioning[C]. The 2004 International Symposium on GNSS/GPS Sydney, Australia 6-8 December 2004